- Aide de Scilab
- CACSD (Computer Aided Control Systems Design)
- Représentations formelles et conversions
- Plot and display
- noisegen
- pol2des
- syslin
- abinv
- arhnk
- arl2
- arma
- arma2p
- arma2ss
- armac
- armax
- armax1
- arsimul
- augment
- balreal
- bilin
- bstap
- cainv
- calfrq
- canon
- ccontrg
- cls2dls
- colinout
- colregul
- cont_mat
- contr
- contrss
- copfac
- csim
- ctr_gram
- damp
- dcf
- ddp
- dhinf
- dhnorm
- dscr
- dsimul
- dt_ility
- dtsi
- equil
- equil1
- feedback
- findABCD
- findAC
- findBD
- findBDK
- findR
- findx0BD
- flts
- fourplan
- freq
- freson
- fspec
- fspecg
- fstabst
- g_margin
- gamitg
- gcare
- gfare
- gfrancis
- gtild
- h2norm
- h_cl
- h_inf
- h_inf_st
- h_norm
- hankelsv
- hinf
- imrep2ss
- inistate
- invsyslin
- kpure
- krac2
- lcf
- leqr
- lft
- lin
- linf
- linfn
- linmeq
- lqe
- lqg
- lqg2stan
- lqg_ltr
- lqr
- ltitr
- macglov
- minreal
- minss
- mucomp
- narsimul
- nehari
- nyquistfrequencybounds
- obs_gram
- obscont
- observer
- obsv_mat
- obsvss
- p_margin
- parrot
- pfss
- phasemag
- plzr
- ppol
- prbs_a
- projsl
- repfreq
- ric_desc
- ricc
- riccati
- routh_t
- rowinout
- rowregul
- rtitr
- sensi
- sident
- sorder
- specfact
- ssprint
- st_ility
- stabil
- sysfact
- syssize
- time_id
- trzeros
- ui_observer
- unobs
- zeropen
Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
csim
simulation (time response) of linear system
Calling Sequence
[y [,x]]=csim(u,t,sl,[x0 [,tol]])
Arguments
- u
function, list or string (control)
- t
real vector specifying times with,
t(1)is the initial time (x0=x(t(1))).- sl
syslinlist (SIMO linear system) in continuous time.- y
a matrix such that
y=[y(t(i)], i=1,..,n- x
a matrix such that
x=[x(t(i)], i=1,..,n- tol
a 2 vector [atol rtol] defining absolute and relative tolerances for ode solver (see ode)
Description
simulation of the controlled linear system sl.
sl is assumed to be a continuous-time system
represented by a syslin list.
u is the control and x0 the initial state.
y is the output and x the state.
The control can be:
1. a function : [inputs]=u(t)
2. a list : list(ut,parameter1,....,parametern) such that:
inputs=ut(t,parameter1,....,parametern) (ut is a function)
3. the string "impuls" for impulse
response calculation (here sl must have
a single input and x0=0). For systems
with direct feedthrough, the infinite pulse at t=0 is
ignored.
4. the string "step" for step response calculation
(here sl must have a single input and
x0=0)
5. a vector giving the values of u corresponding to each t value.
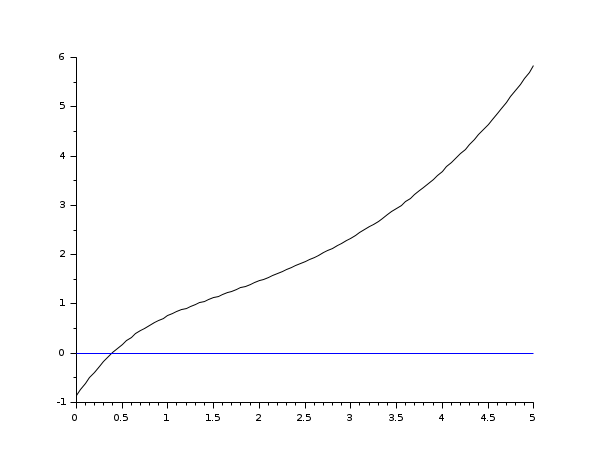
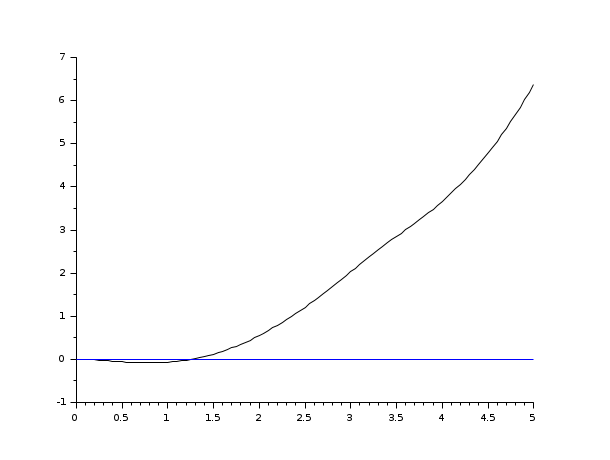
Examples
s=poly(0,'s'); rand('seed',0); w=ssrand(1,1,3); w('A')=w('A')-2*eye(); t=0:0.05:5; //impulse(w) = step (s * w) plot2d([t',t'],[(csim('step',t,tf2ss(s)*w))',0*t'])
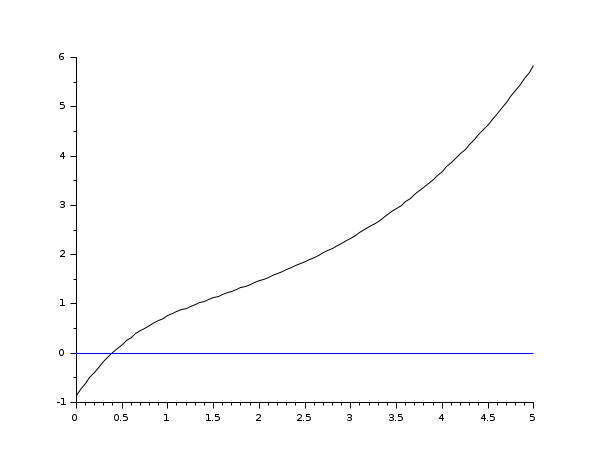
s=poly(0,'s'); rand('seed',0); w=ssrand(1,1,3); w('A')=w('A')-2*eye(); t=0:0.05:5; plot2d([t',t'],[(csim('impulse',t,w))',0*t'])
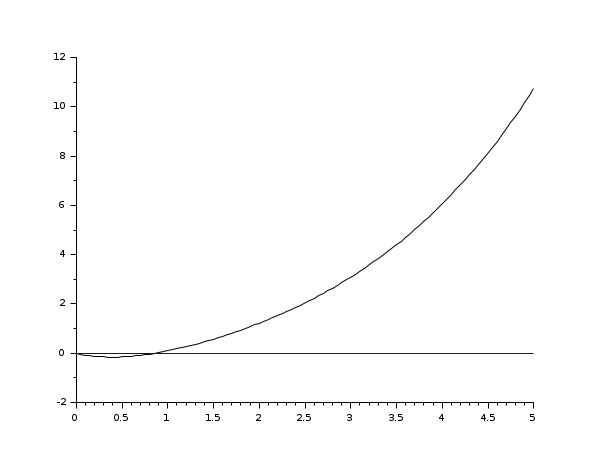
s=poly(0,'s'); rand('seed',0); w=ssrand(1,1,3); w('A')=w('A')-2*eye(); t=0:0.05:5; //step(w) = impulse (s^-1 * w) plot2d([t',t'],[(csim('step',t,w))',0*t'])
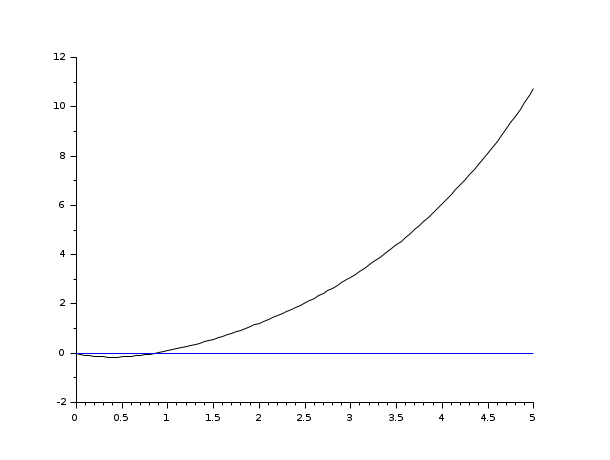
s=poly(0,'s'); rand('seed',0); w=ssrand(1,1,3); w('A')=w('A')-2*eye(); t=0:0.05:5; plot2d([t',t'],[(csim('impulse',t,tf2ss(1/s)*w))',0*t'])
s=poly(0,'s'); rand('seed',0); w=ssrand(1,1,3); w('A')=w('A')-2*eye(); t=0:0.05:5; //input defined by a time function deff('u=timefun(t)','u=abs(sin(t))') clf();plot2d([t',t'],[(csim(timefun,t,w))',0*t'])
See Also
- syslin — définition d'un système dynamique linéaire
- dsimul — state space discrete time simulation
- flts — time response (discrete time, sampled system)
- ltitr — discrete time response (state space)
- rtitr — discrete time response (transfer matrix)
- ode — solveur d'équations différentielles ordinaires
- impl — differential algebraic equation
| Report an issue | ||
| << copfac | CACSD (Computer Aided Control Systems Design) | ctr_gram >> |