Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
wiener
ウイナー推定
呼び出し手順
[xs,ps,xf,pf]=wiener(y,x0,p0,f,g,h,q,r)
パラメータ
- f, g, h
間隔
[t0,tf]におけるシステム行列- f
=
[f0,f1,...,ff], およびfkは nxn行列です- g
=
[g0,g1,...,gf], およびgkは nxn 行列です- h
=
[h0,h1,...,hf],およびhkは mxn 行列です
- q, r
ダイナミクスおよび観測ノイズの共分散行列
- q
=
[q0,q1,...,qf], andqkis a nxn matrix- r
=
[r0,r1,...,rf], およびgkは mxm 行列です
- x0, p0
初期状態量推定値および誤差共分散
- y
間隔
[t0,tf]における観測量.y=[y0,y1,...,yf], およびykは m次列ベクトルです- xs
平滑化された状態推定値
xs= [xs0,xs1,...,xsf], およびxskはn次列ベクトルです- ps
平滑化された推定値の誤差共分散
ps=[p0,p1,...,pf], およびpkは nxn 行列です- xf
平滑化された状態推定値
xf= [xf0,xf1,...,xff], およびxfkはn次列ベクトルです- pf
平滑化された推定値の誤差共分散
pf=[p0,p1,...,pf], およびpkが nxn行列です
説明
フォワード-バックワードカルマンフィルタ定式化により ウイナー推定を出力する関数
例
例
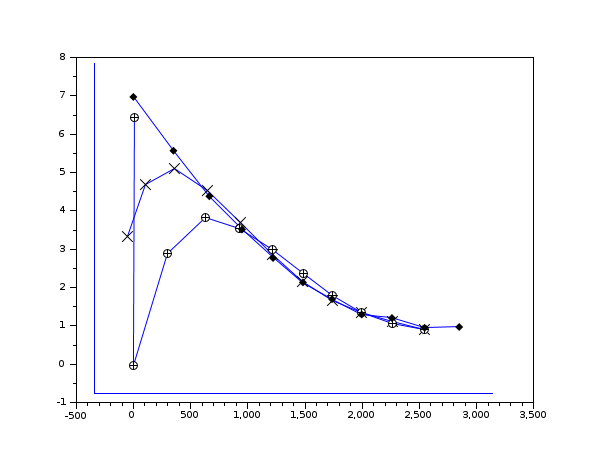
// 統計量(平均および誤差共分散)を初期化 m0=[10 10]'; p0=[100 0;0 100]; // システムを生成 f=[1.1 50.1;0 0.8]; g=[1 0;0 1]; h=[1 0;0 1]; [hi,hj]=size(h); // ノイズの統計量 q=[.01 0;0 0.01]; r=20*eye(2,2); // システム過程を初期化 rand("seed",66); rand("normal"); p0c=chol(p0); x0=m0+p0c'*rand(ones(m0)); y=h*x0+chol(r)'*rand(ones(1:hi))'; yt=y; // プロットする変数を初期化 x=x0; // ループ ft=[f]; gt=[g]; ht=[h]; qt=[q]; rt=[r]; n=10; for k=1:n // 状態変数と観測量を // 時刻 k (すなわち xk および yk) で生成 [x1,y]=system(x0,f,g,h,q,r); x=[x x1]; yt=[yt y]; x0=x1; ft=[ft f]; gt=[gt g]; ht=[ht h]; qt=[qt q]; rt=[rt r]; end // ウィナーフィルタ推定を得る [xs,ps,xf,pf]=wiener(yt,m0,p0,ft,gt,ht,qt,rt); // 結果をプロット a=min([x(1,:)-2*sqrt(ps(1,1:2:2*(n+1))),xf(1,:),xs(1,:)]); b=max([x(1,:)+2*sqrt(ps(1,1:2:2*(n+1))),xf(1,:),xs(1,:)]); c=min([x(2,:)-2*sqrt(ps(2,2:2:2*(n+1))),xf(2,:),xs(2,:)]); d=max([x(2,:)+2*sqrt(ps(2,2:2:2*(n+1))),xf(2,:),xs(2,:)]); xmargin=max([abs(a),abs(b)]); ymargin=max([abs(c),abs(d)]); a=-0.1*xmargin+a; b=.1*xmargin+b; c=-0.1*ymargin+c; d=.1*ymargin+d; // フレーム, 状態変数 (x), および推定値 (xf, および xs)をプロット scf(); plot([a a b],[d c c]); plot2d(x(1,:)',x(2,:)',[2],"000") plot2d(xf(1,:)',xf(2,:)',[2],"000") plot2d(xs(1,:)',xs(2,:)',[2],"000") // データ点をマーク (実データ: * , 推定値: o) plot2d(xs(1,:)',xs(2,:)',[-2],"000") plot2d(xf(1,:)',xf(2,:)',[-3],"000") plot2d(x(1,:)',x(2,:)',[-4],"000")
| Report an issue | ||
| << wfir | filters | wigner >> |