Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
bvode
boundary value problems for ODE using collocation method
bvodeS
Simplified call to bvode
Calling Sequence
zu=bvode(xpoints,N,m,x_low,x_up,zeta,ipar,ltol,tol,fixpnt,fsub,dfsub,gsub,dgsub,guess) zu=bvodeS(xpoints,m,N,x_low,x_up,fsub,gsub,zeta, <optional_args>)
Arguments
- zu
a column vector of size M. The solution of the ode evaluated on the mesh given by points. It contains z(u(x)) for each requested points.
- xpoints
an array which gives the points for which we want to observe the solution.
- N
a scalar with integer value,number of differential equations (N <= 20).
- m
a vector of size
Nwith integer elements.It is the vector of order of each differential equation: m(i)gives the order of the i-th differential equation. In the following,Mwill represent the sum of the elements ofm.- x_low
a scalar: left end of interval
- x_up
a scalar: right end of interval
- zeta
a vector of size M,zeta(j)gives j-th side condition point (boundary point). One must have x_low<=zeta(j) <= zeta(j+1)<=x_upAll side condition points must be mesh points in all meshes used, see description of
ipar(11)andfixpntbelow.- ipar
an array with 11 integer elements:
[
nonlin, collpnt, subint, ntol, ndimf, ndimi, iprint, iread, iguess, rstart,nfxpnt]- nonlin: ipar(1)
0 if the problem is linear, 1 if the problem is nonlinear
- collpnt: ipar(2)
Gives the number of collocation points per subinterval where max(m(j)) <= collpnt <= 7
if
ipar(2)=0thencollpntis set to max ( max(m(j))+1 , 5-max(m(j)) )- subint: ipar(3)
Gives the number of subintervals in the initial mesh. if
ipar(3) = 0then bvode arbitrarily setssubint = 5.- ntol: ipar(4)
Gives the number of solution and derivative tolerances. We require 0 < ntol <= M.
ipar(4)must be set to the dimension of thetolargument or to0. In the latter case the actual value will automatically be set tosize(tol,'*').- ndimf: ipar(5)
Gives the dimension of
fspace(a real work array). its value provides a constraint on nmax the maximum number of subintervals.The ipar(5) value must respect the constraint ipar(5)>=nmax*nsizef where
nsizef=4+3*M+(5+collpnt*N)*(collpnt*N+M)+(2*M-nrec)*2*M(nrecis the number of right end boundary conditions).- ndimi: ipar(6)
Gives the dimension of ispace (an integer work array). its value provides a constraint on nmax, the maximum number of subintervals.
The ipar(6) value must respect the constraint ipar(6)>=nmax*nsizei where
nsizei=3 +collpnt*N+M.- iprint: ipar(7)
output control, make take the following values:
- -1
for full diagnostic printout
- 0
for selected printout
- 1
for no printout
- iread: ipar(8)
- = 0
causes bvode to generate a uniform initial mesh.
- = xx
Other values are not implemented yet in Scilab
- = 1
if the initial mesh is provided by the user. it is defined in fspace as follows: the mesh
will occupy
fspace(1), ..., fspace(n+1). the user needs to supply only the interior mesh pointsfspace(j) = x(j), j = 2, ..., n.- = 2 if the initial mesh is supplied by the user
as with
ipar(8)=1, and in addition no adaptive mesh selection is to be done.
- iguess: ipar(9)
- = 0
if no initial guess for the solution is provided.
- = 1
if an initial guess is provided by the user trought the argument
guess.- = 2
if an initial mesh and approximate solution coefficients are provided by the user in fspace. (the former and new mesh are the same).
- = 3
if a former mesh and approximate solution coefficients are provided by the user in fspace, and the new mesh is to be taken twice as coarse; i.e.,every second point from the former mesh.
- = 4
if in addition to a former initial mesh and approximate solution coefficients, a new mesh is provided in fspace as well. (see description of output for further details on iguess = 2, 3, and 4.)
- ireg: ipar(10)
- = 0
if the problem is regular
- = 1
if the first relax factor is equal to ireg, and the nonlinear iteration does not rely on past covergence (use for an extra sensitive nonlinear problem only).
- = 2
if we are to return immediately upon (a) two successive nonconvergences, or (b) after obtaining error estimate for the first time.
- nfxpnt: ipar(11)
Gives the number of fixed points in the mesh other than
x_lowandx_up(the dimension offixpnt).ipar(11)must be set to the dimension of thefixpntargument or to0. In the latter case the actual value will automatically be set tosize(fixpnt,'*').
- ltol
an array of dimension
ntol=ipar(4).ltol(j) = lspecifies that the j-th tolerance in the tol array controls the error in thel-th component of . It is also required that:
. It is also required that:1 <= ltol(1) < ltol(2) < ... < ltol(ntol) <= M- tol
an array of dimension
ntol=ipar(4).tol(j)is the error tolerance on theltol(j)-th component of . Thus, the code attempts to satisfy
. Thus, the code attempts to satisfy
 on each subinterval
on each subintervalif
 is the approximate solution vector an u the
exact solution (unknown).
is the approximate solution vector an u the
exact solution (unknown).- fixpnt
an array of dimension
nfxpnt=ipar(11). it contains the points, other thanx_lowandx_up, which are to be included in every mesh. The code requires that all side condition points other thanx_lowandx_up(see description of zeta ) be included as fixed points infixpnt.- fsub
an external used to evaluate the column vector
f= for any x such as x_low <= x <= x_up
and for any z=z(u(x)) (see description below)
for any x such as x_low <= x <= x_up
and for any z=z(u(x)) (see description below)The external must have the headings:
In Fortran the calling sequence must be:
subroutine fsub(x,zu,f) double precision zu(*), f(*),x
In C the function prototype must be
And in Scilab
function f=fsub(x, zu, parameters)
- dfsub
an external used to evaluate the Jacobian of
f(x,z(u))at a point x. Wherez(u(x))is defined as forfsuband the (N) by (M) array df should be filled by the partial derivatives of f:
The external must have the headings:
In Fortran the calling sequence must be:
subroutine dfsub(x,zu,df) double precision zu(*), df(*),x
In C the function prototype must be
And in Scilab
function df=dfsub(x, zu, parameters)
- gsub
an external used to evaluate
 given z=
given z=
z = zeta(i)for1<=i<=M.The external must have the headings:
In Fortran the calling sequence must be:
subroutine gsub(i,zu,g) double precision zu(*), g(*) integer i
In C the function prototype must be
And in Scilab
function g=gsub(i, zu, parameters)
Note that in contrast to
finfsub, here only one value per call is returned ing.
- dgsub
an external used to evaluate the i-th row of the Jacobian of
g(x,u(x)). Wherez(u)is as for fsub, i as for gsub and the M-vectordgshould be filled with the partial derivatives of g, viz, for a particular call one calculates
The external must have the headings:
In Fortran the calling sequence must be:
subroutine dgsub(i,zu,dg) double precision zu(*), dg(*)
In C the function prototype must be
And in Scilab
function dg=dgsub(i, zu, parameters)
- guess
An external used to evaluate the initial approximation for
z(u(x))anddmval(u(x))the vector of the mj-th derivatives ofu(x). Note that this subroutine is used only ifipar(9) = 1, and then allMcomponents of zu and N components of dmval should be computed for any x such as x_low <= x <= x_up.The external must have the headings:
In Fortran the calling sequence must be:
subroutine guess(x,zu,dmval) double precision x,z(*), dmval(*)
In C the function prototype must be
And in Scilab
function [dmval, zu]=fsub(x, parameters)
- <optional_args>
It should be either:
any left part of the ordered sequence of values:
guess, dfsub, dgsub, fixpnt, ndimf, ndimi, ltol, tol, ntol,nonlin, collpnt, subint, iprint, ireg, ifailor any sequence of
arg_name=argvaluewitharg_namein:guess,dfsub,dgsub,fixpnt,ndimf,ndimi,ltol,tol,ntol,nonlin,collpnt,subint,iprint,ireg,ifail
Where all these arguments excepted
ifailare described above.ifailcan be used to display the bvode call corresonding to the selected optional arguments. Ifguessis giveniguessis set to 1
Description
These functions solves a multi-point boundary value problem for a mixed order system of ode-s given by
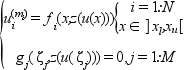
Where
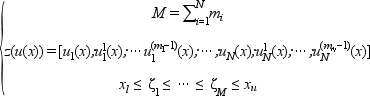
The argument zu used by the external functions
and returned by bvode is the column vector formed by
the components of z(u(x)) for a given x.
The method used to approximate the solution u is collocation at gaussian points, requiring m(i)-1 continuous derivatives in the i-th component, i = 1:N. here, k is the number of collocation points (stages) per subinterval and is chosen such that k .ge. max m(i). a runge-kutta-monomial solution representation is utilized.
Examples
The first two problems below are taken from the paper [1] of the Bibliography.
The problem 1 describes a uniformy loaded beam of variable stifness, simply supported at both end.
It may be defined as follow :
Solve the fourth order differential equation:

Subjected to the boundary conditions:

The exact solution of this problem is known to be:

N=1;// just one differential equation m=4;//a fourth order differential equation M=sum(m); x_low=1;x_up=2; // the x limits zeta=[x_low,x_low,x_up,x_up]; //two constraints (on the value of u and its second derivative) on each bound. //The external functions //Theses functions are called by the solver with zu=[u(x);u'(x);u''(x);u'''(x)] // - The function which computes the right hand side of the differential equation function f=fsub(x, zu),f=(1-6*x^2*zu(4)-6*x*zu(3))/x^3,endfunction // - The function which computes the derivative of fsub with respect to zu function df=dfsub(x, zu),df=[0,0,-6/x^2,-6/x],endfunction // - The function which computes the ith constraint for a given i function g=gsub(i, zu), select i case 1 then //x=zeta(1)=1 g=zu(1) //u(1)=0 case 2 then //x=zeta(2)=1 g=zu(3) //u''(1)=0 case 3 then //x=zeta(3)=2 g=zu(1) //u(2)=0 case 4 then //x=zeta(4)=2 g=zu(3) //u''(2)=0 end endfunction // - The function which computes the derivative of gsub with respect to z function dg=dgsub(i, z) select i case 1 then //x=zeta(1)=1 dg=[1,0,0,0] case 2 then //x=zeta(2)=1 dg=[0,0,1,0] case 3 then //x=zeta(3)=2 dg=[1,0,0,0] case 4 then //x=zeta(4)=2 dg=[0,0,1,0] end endfunction // - The function which computes the initial guess, unused here function [zu, mpar]=guess(x),zu=0;mpar=0,endfunction //define the function which computes the exact value of u for a given x ( for testing purposes) function zu=trusol(x) zu=0*ones(4,1) zu(1) = 0.25*(10*log(2)-3)*(1-x) + 0.5 *( 1/x + (3+x)*log(x) - x) zu(2) = -0.25*(10*log(2)-3) + 0.5 *(-1/x^2 + (3+x)/x + log(x) - 1) zu(3) = 0.5*( 2/x^3 + 1/x - 3/x^2) zu(4) = 0.5*(-6/x^4 - 1/x/x + 6/x^3) endfunction fixpnt=[ ];//All boundary conditions are located at x_low and x_up // nonlin collpnt n ntol ndimf ndimi iprint iread iguess rstart nfxpnt ipar=[0 0 1 2 2000 200 1 0 0 0 0 ] ltol=[1,3];//set tolerance control on zu(1) and zu(3) tol=[1.e-11,1.e-11];//set tolreance values for these two controls xpoints=x_low:0.01:x_up; zu=bvode(xpoints,N,m,x_low,x_up,zeta,ipar,ltol,tol,fixpnt,... fsub,dfsub,gsub,dgsub,guess) //check the constraints zu([1,3],[1 $]) //should be zero plot(xpoints,zu(1,:)) // the evolution of the solution u zu1=[];for x=xpoints,zu1=[zu1,trusol(x)]; end; norm(zu-zu1)
Same problem using
bvodeSand an initial guessThe problem 2 describes the small finite deformation of a thin shallow spherical cap of constant thickness subject to a quadratically varying axisymmetric external pressure distribution. Here phi is the meridian angle change of the deformed shell and psi is a stress function. For eps=mu=1e-3 two different solutions may found depending on the starting point
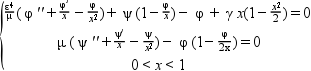
Subject to the boundary conditions
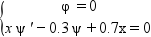
for
x=0andx=1N=2;// two differential equations m=[2 2];//each differential equation is of second order M=sum(m); x_low=0;x_up=1; // the x limits zeta=[x_low,x_low, x_up x_up]; //two constraints on each bound. //The external functions //Theses functions are called by the solver with zu=[u1(x);u1'(x);u2(x);u2'(x)] // - The function which computes the right hand side of the differential equation function f=fsub2(x, zu, eps, dmu, eps4mu, gam, xt), f=[zu(1)/x^2-zu(2)/x+(zu(1)-zu(3)*(1-zu(1)/x)-gam*x*(1-x^2/2))/eps4mu //phi'' zu(3)/x^2-zu(4)/x+zu(1)*(1-zu(1)/(2*x))/dmu];//psi'' endfunction // - The function which computes the derivative of fsub with respect to zu function df=dfsub2(x, zu, eps, dmu, eps4mu, gam, xt), df=[1/x^2+(1+zu(3)/x)/eps4mu, -1/x, -(1-zu(1)/x)/eps4mu, 0 (1-zu(1)/x)/dmu 0 1/x^2 -1/x]; endfunction // - The function which computes the ith constraint for a given i function g=gsub2(i, zu), select i case 1 then //x=zeta(1)=0 g=zu(1) //u(0)=0 case 2 then //x=zeta(2)=0 g=-0.3*zu(3) //x*psi'-0.3*psi+0.7x=0 case 3 then //x=zeta(3)=1 g=zu(1) //u(1)=0 case 4 then //x=zeta(4)=1 g=1*zu(4)-0.3*zu(3)+0.7*1 //x*psi'-0.3*psi+0.7x=0 end endfunction // - The function which computes the derivative of gsub with respect to z function dg=dgsub2(i, z) select i case 1 then //x=zeta(1)=1 dg=[1,0,0,0] case 2 then //x=zeta(2)=1 dg=[0,0,-0.3,0] case 3 then //x=zeta(3)=2 dg=[1,0,0,0] case 4 then //x=zeta(4)=2 dg=[0,0,-0.3,1] end endfunction gam=1.1 eps=1d-3 dmu=eps eps4mu=eps^4/dmu xt=sqrt(2*(gam-1)/gam) fixpnt=[ ];//All boundary conditions are located at x_low and x_up collpnt=4; nsizef=4+3*M+(5+collpnt*N)*(collpnt*N+M)+(2*M-2)*2*M ; nsizei=3 + collpnt*N+M;; nmax=200; // nonlin collpnt n ntol ndimf ndimi iprint iread iguess rstart nfxpnt ipar=[1 k 10 4 nmax*nsizef nmax*nsizei -1 0 0 0 0 ] ltol=1:4;//set tolerance control on zu(1) zu(2 ) zu(3) and zu(4) tol=[1.e-5,1.e-5,1.e-5,1.e-5];//set tolreance values for these four controls xpoints=x_low:0.01:x_up; zu=bvode(xpoints,N,m,x_low,x_up,zeta,ipar,ltol,tol,fixpnt,... fsub2,dfsub2,gsub2,dgsub2,guess2); scf(1);clf();plot(xpoints,zu([1 3],:)) // the evolution of the solution phi and psi //using an initial guess // - The function which computes the initial guess, unused here function [zu, dmval]=guess2(x, gam), cons=gam*x*(1-x^2/2) dcons=gam*(1-3*x^2/2) d2cons=-3*gam*x dmval=zeros(2,1) if x>xt then zu=[0 0 -cons -dcons] dmval(2)=-d2cons else zu=[2*x;2;-2*x+cons;-2*dcons] dmval(2)=d2cons end endfunction ipar(9)=1;//iguess zu2=bvode(xpoints,N,m,x_low,x_up,zeta,ipar,ltol,tol,fixpnt,... fsub2,dfsub2,gsub2,dgsub2,guess2); scf(2);clf();plot(xpoints,zu2([1 3],:)) // the evolution of the solution phi and psi
An eigenvalue problem:
// y''(x)=-la*y(x) // BV: y(0)=y'(0); y(1)=0 // Eigenfunctions and eigenvalues are y(x,n)=sin(s(n)*(1-x)), la(n)=s(n)^2, // where s(n) are the zeros of f(s,n)=s+atan(s)-(n+1)*pi, n=0,1,2,... // To get a third boundary condition, we choose y(0)=1 // (With y(x) also c*y(x) is a solution for each constant c.) // We solve the following ode system: // y''=-la*y // la'=0 // BV: y(0)=y'(0), y(0)=1; y(1)=0 // z=[y(x) ; y'(x) ; la] function rhs=fsub(x, z) rhs=[-z(3)*z(1);0] endfunction function g=gsub(i, z) g=[z(1)-z(2) z(1)-1 z(1)] g=g(i) endfunction // The following start function is good for the first 8 eigenfunctions. function [z, lhs]=ystart(x, z, la0) z=[1;0;la0] lhs=[0;0] endfunction a=0;b=1; m=[2;1]; n=2; zeta=[a a b]; N=101; x=linspace(a,b,N)'; // We have s(n)-(n+1/2)*pi -> 0 for n to infinity. la0=input('n-th eigenvalue: n= ?');la0=(%pi/2+la0*%pi)^2; z=bvodeS(x,m,n,a,b,fsub,gsub,zeta,ystart=list(ystart,la0)); clf() plot(x,[z(1,:)' z(2,:)']) xtitle(['Startvalue = '+string(la0);'Eigenvalue = '+string(z(3,1))],'x',' ') legend(['y(x)';'y''(x)'])
A boundary value problem with more than one solution.
// DE: y''(x)=-exp(y(x)) // BV: y(0)=0; y(1)=0 // This boundary value problem has more than one solution. // It is demonstrated how to find two of them with the help of // some preinformation of the solutions y(x) to build the function ystart. // z=[y(x);y'(x)] a=0;b=1;m=2;n=1; zeta=[a b]; N=101; tol=1e-8*[1 1]; x=linspace(a,b,N); function rhs=fsub(x, z),rhs=-exp(z(1));endfunction function g=gsub(i, z) g=[z(1) z(1)] g=g(i) endfunction function [z, lhs]=ystart(x, z, M) //z=[4*x*(1-x)*M ; 4*(1-2*x)*M] z=[M;0] //lhs=[-exp(4*x*(1-x)*M)] lhs=0 endfunction for M=[1 4] if M==1 z=bvodeS(x,m,n,a,b,fsub,gsub,zeta,ystart=list(ystart,M),tol=tol); else z1=bvodeS(x,m,n,a,b,fsub,gsub,zeta,ystart=list(ystart,M),tol=tol); end end // Integrating the ode yield e.g. the two solutions yex and yex1. function y=f(c),y=c.*(1-tanh(sqrt(c)/4).^2)-2;endfunction c=fsolve(2,f); function y=yex(x, c) y=log(c/2*(1-tanh(sqrt(c)*(1/4-x/2)).^2)) endfunction function y=f1(c1), y=2*c1^2+tanh(1/4/c1)^2-1;endfunction c1=fsolve(0.1,f1); function y=yex1(x, c1) y=log((1-tanh((2*x-1)/4/c1).^2)/2/c1/c1) endfunction disp(norm(z(1,:)-yex(x)),'norm(yex(x)-z(1,:))= ') disp(norm(z1(1,:)-yex1(x)),'norm(yex1(x)-z1(1,:))= ') clf(); subplot(2,1,1) plot2d(x,z(1,:),style=[5]) xtitle('Two different solutions','x',' ') subplot(2,1,2) plot2d(x,z1(1,:),style=[5]) xtitle(' ','x',' ')
A multi-point boundary value problem.
// DE y'''(x)=1 // z=[y(x);y'(x);y''(x)] // BV: y(-1)=2 y(1)=2 // Side condition: y(0)=1 a=-1;b=1;c=0; // The side condition point c must be included in the array fixpnt. n=1; m=[3]; function rhs=fsub(x, z) rhs=1 endfunction function g=gsub(i, z) g=[z(1)-2 z(1)-1 z(1)-2] g=g(i) endfunction N=10; zeta=[a c b]; x=linspace(a,b,N); z=bvodeS(x,m,n,a,b,fsub,gsub,zeta,fixpnt=c); function y=yex(x) y=x.^3/6+x.^2-x./6+1 endfunction disp(norm(yex(x)-z(1,:)),'norm(yex(x)-z(1,:))= ')
Used Functions
This function is based on the Fortran routine
colnew developped by
U. Ascher, Department of Computer Science, University of British Columbia, Vancouver, B.C. V6T 1W5, Canada
G. Bader, institut f. Angewandte mathematik university of Heidelberg; im Neuenheimer feld 294d-6900 Heidelberg 1
Authors
This help is based on the original colnew.f comments, adapted to Scilab by J.P Chancelier ENPC, on the bvodeS help page due to Rainer von Seggern, both merged and revised by S. Steer INRIA
Bibliography
U. Ascher, J. Christiansen and R.D. Russell, collocation software for boundary-value ODEs, acm trans. math software 7 (1981), 209-222. this paper contains EXAMPLES where use of the code is demonstrated.
G. Bader and U. Ascher, a new basis implementation for a mixed order boundary value ode solver, siam j. scient. stat. comput. (1987).
U. Ascher, J. Christiansen and R.D. Russell, a collocation solver for mixed order systems of boundary value problems, math. comp. 33 (1979), 659-679.
U. Ascher, J. Christiansen and R.D. russell, colsys - a collocation code for boundary value problems, lecture notes comp.sc. 76, springer verlag, b. childs et. al. (eds.) (1979), 164-185.
C. Deboor and R. Weiss, solveblok: a package for solving almost block diagonal linear systems, acm trans. math. software 6 (1980), 80-87.
| << odeoptions | Equações Diferenciais | Funções Elementares >> |