- Scilab Help
- CACSD (Computer Aided Control Systems Design)
- Formal representations and conversions
- Plot and display
- abinv
- arhnk
- arl2
- arma
- arma2p
- arma2ss
- armac
- armax
- armax1
- arsimul
- augment
- balreal
- bilin
- bstap
- cainv
- calfrq
- canon
- ccontrg
- cls2dls
- colinout
- colregul
- cont_mat
- contr
- contrss
- copfac
- csim
- ctr_gram
- damp
- dcf
- ddp
- dhinf
- dhnorm
- dscr
- dsimul
- dt_ility
- dtsi
- equil
- equil1
- feedback
- findABCD
- findAC
- findBD
- findBDK
- findR
- findx0BD
- flts
- fourplan
- freq
- freson
- fspec
- fspecg
- fstabst
- g_margin
- gamitg
- gcare
- gfare
- gfrancis
- gtild
- h2norm
- h_cl
- h_inf
- h_inf_st
- h_norm
- hankelsv
- hinf
- imrep2ss
- inistate
- invsyslin
- kpure
- krac2
- lcf
- leqr
- lft
- lin
- linf
- linfn
- linmeq
- lqe
- lqg
- lqg2stan
- lqg_ltr
- lqr
- ltitr
- macglov
- minreal
- minss
- mucomp
- narsimul
- nehari
- noisegen
- nyquistfrequencybounds
- obs_gram
- obscont
- observer
- obsv_mat
- obsvss
- p_margin
- parrot
- pfss
- phasemag
- plzr
- pol2des
- ppol
- prbs_a
- projsl
- repfreq
- ric_desc
- ricc
- riccati
- routh_t
- rowinout
- rowregul
- rtitr
- sensi
- sident
- sorder
- specfact
- ssprint
- st_ility
- stabil
- sysfact
- syslin
- syssize
- time_id
- trzeros
- ui_observer
- unobs
- zeropen
Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
armax
armax identification
Calling Sequence
[arc,la,lb,sig,resid]=armax(r,s,y,u,[b0f,prf])
Arguments
- y
output process y(ny,n); ( ny: dimension of y , n : sample size)
- u
input process u(nu,n); ( nu: dimension of u , n : sample size)
- r and s
auto-regression orders r >=0 et s >=-1
- b0f
optional parameter. Its default value is 0 and it means that the coefficient b0 must be identified. if bof=1 the b0 is supposed to be zero and is not identified
- prf
optional parameter for display control. If prf =1, the default value, a display of the identified Arma is given.
- arc
a Scilab arma object (see armac)
- la
is the list(a,a+eta,a-eta) ( la = a in dimension 1) ; where eta is the estimated standard deviation. , a=[Id,a1,a2,...,ar] where each ai is a matrix of size (ny,ny)
- lb
is the list(b,b+etb,b-etb) (lb =b in dimension 1) ; where etb is the estimated standard deviation. b=[b0,.....,b_s] where each bi is a matrix of size (nu,nu)
- sig
is the estimated standard deviation of the noise and resid=[ sig*e(t0),....] (
Description
armax is used to identify the coefficients of a n-dimensional ARX process
A(z^-1)y= B(z^-1)u + sig*e(t)
where e(t) is a n-dimensional white noise with variance I. sig an nxn matrix and A(z) and B(z):
A(z) = 1+a1*z+...+a_r*z^r; ( r=0 => A(z)=1) B(z) = b0+b1*z+...+b_s z^s ( s=-1 => B(z)=0)
for the method see Eykhoff in trends and progress in system identification, page 96.
with
z(t)=[y(t-1),..,y(t-r),u(t),...,u(t-s)]
and
coef= [-a1,..,-ar,b0,...,b_s]
we can write
y(t)= coef* z(t) + sig*e(t) and the algorithm minimises
sum_{t=1}^N ( [y(t)- coef'z(t)]^2)
where t0=max(max(r,s)+1,1))).
Examples
//-Ex1- Arma model : y(t) = 0.2*u(t-1)+0.01*e(t-1) ny=1,nu=1,sig=0.01; Arma=armac(1,[0,0.2],[0,1],ny,nu,sig) //defining the above arma model u=rand(1,1000,'normal'); //a random input sequence u y=arsimul(Arma,u); //simulation of a y output sequence associated with u. Armaest=armax(0,1,y,u); //Identified model given u and y. Acoeff=Armaest('a'); //Coefficients of the polynomial A(x) Bcoeff=Armaest('b') //Coefficients of the polynomial B(x) Dcoeff=Armaest('d'); //Coefficients of the polynomial D(x) [Ax,Bx,Dx]=arma2p(Armaest) //Results in polynomial form.
//-Ex2- Arma1: y_t -0.8*y_{t-1} + 0.2*y_{t-2} = sig*e(t) ny=1,nu=1;sig=0.001; // First step: simulation the Arma1 model, for that we define // Arma2: y_t -0.8*y_{t-1} + 0.2*y_{t-2} = sig*u(t) // with normal deviates for u(t). Arma2=armac([1,-0.8,0.2],sig,0,ny,nu,0); //Definition of the Arma2 arma model (a model with B=sig and without noise!) u=rand(1,10000,'normal'); // An input sequence for Arma2 y=arsimul(Arma2,u); // y = output of Arma2 with input u // can be seen as output of Arma1. // Second step: identification. We look for an Arma model // y(t) + a1*y(t-1) + a2 *y(t-2) = sig*e(t) Arma1est=armax(2,-1,y,[]); [A,B,D]=arma2p(Arma1est)
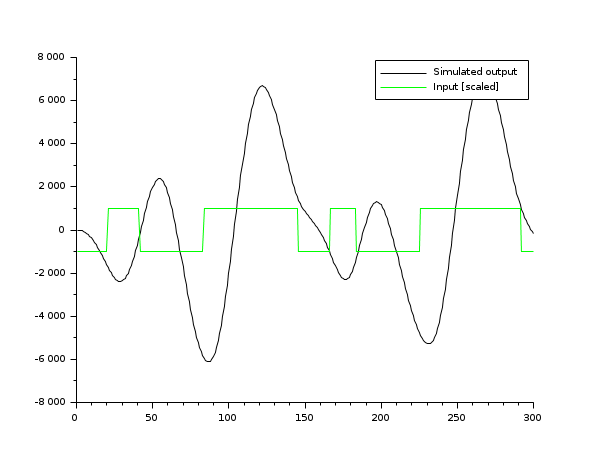
a = [1, -2.851, 2.717, -0.865]; b = [0, 1, 1, 1]; d = [1, 0.7, 0.2]; ar = armac(a, b, d, 1, 1, 1); disp(_("Simulation of an ARMAX process:")); disp(ar); // The input n = 300; u = -prbs_a(n, 1, int([2.5,5,10,17.5,20,22,27,35]*100/12)); // simulation zd = narsimul(ar, u); // visualization plot2d(1:n,[zd',1000*u'],style=[1,3]);curves = gce(); legend(["Simulated output";"Input [scaled]"])
See Also
| Report an issue | ||
| << armac | CACSD (Computer Aided Control Systems Design) | armax1 >> |