- Aide Scilab
- CACSD (Computer Aided Control Systems Design)
- format_representation
- Plot and display
- pol2des
- syslin
- abinv
- arhnk
- arl2
- arma
- arma2p
- arma2ss
- armac
- armax
- armax1
- arsimul
- augment
- balreal
- bilin
- bstap
- cainv
- calfrq
- canon
- ccontrg
- cls2dls
- colinout
- colregul
- cont_mat
- contr
- contrss
- copfac
- csim
- ctr_gram
- damp
- dcf
- ddp
- dhinf
- dhnorm
- dscr
- dsimul
- dt_ility
- dtsi
- equil
- equil1
- feedback
- findABCD
- findAC
- findBD
- findBDK
- findR
- findx0BD
- flts
- fourplan
- freq
- freson
- fspec
- fspecg
- fstabst
- g_margin
- gamitg
- gcare
- gfare
- gfrancis
- gtild
- h2norm
- h_cl
- h_inf
- h_inf_st
- h_norm
- hankelsv
- hinf
- imrep2ss
- inistate
- invsyslin
- kpure
- krac2
- lcf
- leqr
- lft
- lin
- linf
- linfn
- linmeq
- lqe
- lqg
- lqg2stan
- lqg_ltr
- lqr
- ltitr
- macglov
- minreal
- minss
- mucomp
- narsimul
- nehari
- noisegen
- nyquistfrequencybounds
- obs_gram
- obscont
- observer
- obsv_mat
- obsvss
- p_margin
- parrot
- pfss
- phasemag
- plzr
- ppol
- prbs_a
- projsl
- reglin
- repfreq
- ric_desc
- ricc
- riccati
- routh_t
- rowinout
- rowregul
- rtitr
- sensi
- sident
- sorder
- specfact
- ssprint
- st_ility
- stabil
- sysfact
- syssize
- time_id
- trzeros
- ui_observer
- unobs
- zeropen
Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
flts
time response (discrete time, sampled system)
Calling Sequence
[y [,x]]=flts(u,sl [,x0]) [y]=flts(u,sl [,past])
Arguments
- u
matrix (input vector)
- sl
list (linear system
syslin)- x0
vector (initial state ; default value=
0)- past
matrix (of the past ; default value=
0)- x,y
matrices (state and output)
Description
State-space form:
sl is a discrete linear system given by its state
space representation (see syslin ):
sl=syslin('d',A,B,C,D) :
x[t+1] = A x[t] + B u[t] y[t] = C x[t] + D u[t]
or, more generally, if D is a polynomial matrix
(p = degree(D(z))) :
D(z) = D_0 + z D_1 + z^2 D_2 +..+ z^p D_p y[t] = C x[t] + D_0 u[t] + D_1 u[t+1] +..+ D_[p] u[t+p]
Transfer form:
y=flts(u,sl[,past]). Here sl
is a linear system in transfer matrix representation i.e
sl=syslin('d',transfer_matrix) (see
syslin
).
past = [u ,..., u ] [ -nd -1] [y ,..., y ] [ -nd -1]
is the matrix of past values of u and y.
nd is the maximum of degrees of lcm's of each row
of the denominator matrix of sl.
u=[u0 u1 ... un] (input) y=[y0 y1 ... yn] (output)
p is the difference between maximum degree of numerator and maximum degree of denominator
Examples
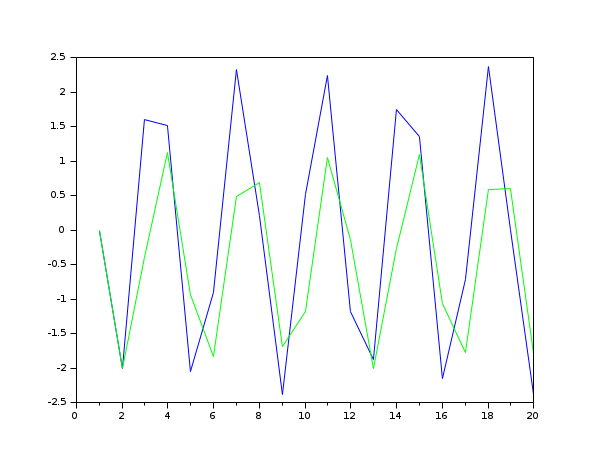
sl=syslin('d',1,1,1);u=1:10; y=flts(u,sl); plot2d(y) [y1,x1]=flts(u(1:5),sl);y2=flts(u(6:10),sl,x1); y-[y1,y2] //With polynomial D: z=poly(0,'z'); D=1+z+z^2; p =degree(D); sl=syslin('d',1,1,1,D); y=flts(u,sl);[y1,x1]=flts(u(1:5),sl); y2=flts(u(5-p+1:10),sl,x1); // (update) y-[y1,y2] //Delay (transfer form): flts(u,1/z) // Usual responses z=poly(0,'z'); h=syslin(0.1,(1-2*z)/(z^2+0.3*z+1)) imprep=flts(eye(1,20),tf2ss(h)); //Impulse response clf(); plot(imprep,'b') u=ones(1,20); stprep=flts(ones(1,20),tf2ss(h)); //Step response plot(stprep,'g')
// Other examples A=[1 2 3;0 2 4;0 0 1]; B=[1 0;0 0;0 1]; C=eye(3,3); Sys=syslin('d',A,B,C); H=ss2tf(Sys); u=[1;-1]*(1:10); // yh=flts(u,H); ys=flts(u,Sys); norm(yh-ys,1) //hot restart [ys1,x]=flts(u(:,1:4),Sys);ys2=flts(u(:,5:10),Sys,x); norm([ys1,ys2]-ys,1) // yh1=flts(u(:,1:4),H);yh2=flts(u(:,5:10),H,[u(:,2:4);yh(:,2:4)]); norm([yh1,yh2]-yh,1) //with D<>0 D=[-3 8;4 -0.5;2.2 0.9]; Sys=syslin('d',A,B,C,D); H=ss2tf(Sys); u=[1;-1]*(1:10); rh=flts(u,H); rs=flts(u,Sys); norm(rh-rs,1) //hot restart [ys1,x]=flts(u(:,1:4),Sys);ys2=flts(u(:,5:10),Sys,x); norm([ys1,ys2]-rs,1) //With H: yh1=flts(u(:,1:4),H);yh2=flts(u(:,5:10),H,[u(:,2:4); yh1(:,2:4)]); norm([yh1,yh2]-rh)
See Also
| Report an issue | ||
| << findx0BD | CACSD (Computer Aided Control Systems Design) | fourplan >> |