Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
xcorr
離散自己/相互相関を計算する
呼び出し手順
[c, lagindex] = xcorr(x) [c, lagindex] = xcorr(x, y) [c, lagindex] = xcorr(.., maxlags) [c, lagindex] = xcorr(.., maxlags, scaling)
パラメータ
- x
実数または複素浮動小数点数のベクトル.
- y
実数または複素浮動小数点数のベクトル. デフォルト値は
x.- maxlags
スカラーで,1より大きな整数. デフォルト値は
n. ただし,nはx,yベクトルの長さの大きい方です.- scaling
文字列で,値は以下のどれか:
"biased","unbiased","coeff","none". デフォルト値は"none".- c
実数または浮動小数点数のベクトルで,向きは
xと同じです.- lagindex
行ベクトルで,
cの値に 対応する添字(lag index)を有します.
説明
c=xcorr(x)は,以下のように正規化しない離散自己共分散を計算します:
そして,
cを返します. 自己共分散の並びは, Ck=-n:n となります.ただし,nは,xの長さです.xcorr(x,y)は正規化しない離散相互共分散を以下のように計算します:
結果を
cに返します. 相互共分散の並びは, Ck=-n:nとなります. ただし,nは,xおよびyの長さの大きい方です.
maxlags 引数が指定された場合,
xcorr は c を
返し,共分散の並びは Ck=-maxlags:maxlags と
なります.
maxlags が length(x)よりも
大きい場合, cの先頭と末尾の複数の値は
ゼロになります.
scaling 引数は,
cに結果を出力する前に
C(k)を正規化する方法を以下のように指定します:
- "biased":
c=C/n. - "unbiased":
c=C./(n-(-maxlags:maxlags)). - "coeff":
c=C/(norm(x)*norm(y)).
 | corr
関数は 手法この関数は,ifft(fft(x).*conj(fft(y)))により
Cを計算します. |
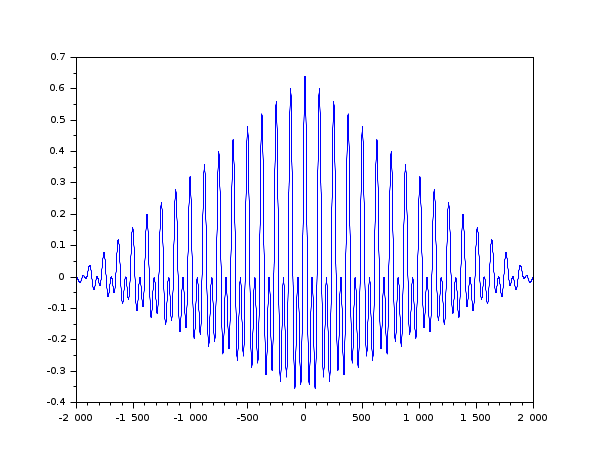
例
t = linspace(0, 100, 2000); y = 0.8 * sin(t) + 0.8 * sin(2 * t); [c, ind] = xcorr(y, "biased"); plot(ind, c)
履歴
| バージョン | 記述 |
| 5.4.0 | xcorr追加. |
| Report an issue | ||
| << hank | Correlation Convolution | Filters >> |