Scilab 5.4.1
Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
levin
(多次元)LevinsonアルゴリズムによりToeplitz システムを解く
呼び出し手順
[la,sig]=levin(n,cov)
パラメータ
- n
整数値のスケール: フィルタの最大次数
- cov
(nlag*d) x d行列.Rkを有します 以下のように保存されたRk(d次の過程の場合はd x d行列)を有します:
- la
リスト, 再帰的に計算された係数を
AkとするLevinson多項式 (次数は1からn),- sig
リスト, 一連の二乗誤差平均.
説明
以下のToeplitzシステム(正規方程式)をnについて再帰的に 解く関数
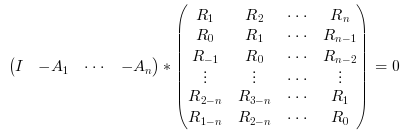
ただし, {Rk;k=1:nlag} は
nlag個の経験的共分散の系列です.
例
//We use the 'levin' macro for solving the normal equations //on two examples: a one-dimensional and a two-dimensional process. //We need the covariance sequence of the stochastic process. //This example may usefully be compared with the results from //the 'phc' macro (see the corresponding help and example in it) // // //1) A one-dimensional process // ------------------------- // //We generate the process defined by two sinusoids (1Hz and 2 Hz) //in additive Gaussian noise (this is the observed process); //the simulated process is sampled at 10 Hz (step 0.1 in t, underafter). t1=0:.1:100;rand('normal'); y1=sin(2*%pi*t1)+sin(2*%pi*2*t1);y1=y1+rand(y1);plot(t1,y1); //covariance of y1 nlag=128; c1=corr(y1,nlag); c1=c1';//c1 needs to be given columnwise (see the section PARAMETERS of this help) //compute the filter for a maximum order of n=10 //la is a list-type variable each element of which //containing the filters of order ranging from 1 to n; (try varying n) //in the d-dimensional case this is a matrix polynomial (square, d X d) //sig gives, the same way, the mean-square error n=15; [la1,sig1]=levin(n,c1); //verify that the roots of 'la' contain the //frequency spectrum of the observed process y //(remember that y is sampled -in our example //at 10Hz (T=0.1s) so that we need to retrieve //the original frequencies (1Hz and 2 Hz) through //the log and correct scaling by the frequency sampling) //we verify this for each filter order for i=1:n, s1=roots(la1(i));s1=log(s1)/2/%pi/.1; //now we get the estimated poles (sorted, positive ones only !) s1=gsort(imag(s1));s1=s1(1:i/2);end; //the last two frequencies are the ones really present in the observed //process ---> the others are "artifacts" coming from the used model size. //This is related to the rather difficult problem of order estimation. // //2) A 2-dimensional process // ----------------------- //(4 frequencies 1, 2, 3, and 4 Hz, sampled at 0.1 Hz : // |y_1| y_1=sin(2*Pi*t)+sin(2*Pi*2*t)+Gaussian noise // y=| | with : // |y_2| y_2=sin(2*Pi*3*t)+sin(2*Pi*4*t)+Gaussian noise d=2;dt=0.1; nlag=64; t2=0:2*%pi*dt:100; y2=[sin(t2)+sin(2*t2)+rand(t2);sin(3*t2)+sin(4*t2)+rand(t2)]; c2=[]; for j=1:2, for k=1:2, c2=[c2;corr(y2(k,:),y2(j,:),nlag)];end;end; c2=matrix(c2,2,128);cov=[]; for j=1:64,cov=[cov;c2(:,(j-1)*d+1:j*d)];end;//covar. columnwise c2=cov; //in the multidimensional case, we have to compute the //roots of the determinant of the matrix polynomial //(easy in the 2-dimensional case but tricky if d>=3 !). //We just do that here for the maximum desired //filter order (n); mp is the matrix polynomial of degree n [la2,sig2]=levin(n,c2); mp=la2(n);determinant=mp(1,1)*mp(2,2)-mp(1,2)*mp(2,1); s2=roots(determinant);s2=log(s2)/2/%pi/0.1;//same trick as above for 1D process s2=gsort(imag(s2));s2=s2(1:d*n/2);//just the positive ones ! //There the order estimation problem is seen to be much more difficult ! //many artifacts ! The 4 frequencies are in the estimated spectrum //but beneath many non relevant others.
参照
- phc — Markovian表現
| Report an issue | ||
| << lev | filters | lindquist >> |