bvode
задачи граничных значений для ОДУ с помощью метода коллокации
bvodeS
упрощённый вызов bvode
Синтаксис
zu = bvode(xpoints,N,m,x_low,x_up,zeta,ipar,ltol,tol,fixpnt,fsub,dfsub,gsub,dgsub,guess)
zu = bvodeS(xpoints,m,N,x_low,x_up,fsub,gsub,zeta, <optional_args>)
Аргументы
- zu
вектор-столбец длиной
M. Решение ОДУ, вычисленное по сетке, заданной точками. Она содержитz(u(x))для каждой искомой точки;- xpoints
массив, который содержит точки для которых нужно найти решение;
- N
скаляр с целочисленным значением, количество дифференциальных уравнений (
N<= 20).- m
вектор размером
Nс целочисленными элементами. Это вектор порядка каждого из дифференциальных уравнений:m(i)указывает порядокi-го дифференциального уравнения. Далее,Mбудет представлять сумму элементовm.- x_low
скаляр: левый конец интервала
- x_up
скаляр: правый конец интервала
- zeta
вектор размером
M;zeta(j)указываетj-тую точку граничного условия (граничную точку). Необходимо, чтобы выполнялось условиеx_low<=zeta(j)<=zeta(j+1)<=x_up.Все точки граничных условий должны составлять сетку точек во всех используемых сетках, см. ниже описание
ipar(11)иfixpnt.- ipar
массив с 11-ю целочисленными элементами:
[nonlin, collpnt, subint, ntol, ndimf, ndimi, iprint, iread, iguess, rstart,nfxpnt]- nonlin: ipar(1)
0, если задача линейна; 1, если задача нелинейна.
- collpnt: ipar(2)
Задаёт количество рядом расположенных точек на подынтервале, где
max(m(j)) <= collpnt <= 7.Если
ipar(2)=0, тоcollpntустановлен равнымmax( max(m(j))+1, 5-max(m(j))).- subint: ipar(3)
Задаёт количество подынтервалов в исходной сетке. Если
ipar(3) = 0, тоbvodeпроизвольным образом устанавливаетсяsubint = 5.- ntol: ipar(4)
Задаёт количество решений и допустимые отклонения производных. Требуется, чтобы
0 < ntol <= M.ipar(4)должно быть установлено равным размеру аргументаtolили равным0. В последнем случае фактическое значение будет автоматически установлено равнымsize(tol,'*').- ndimf: ipar(5)
Задаёт размер
fspace(вещественнозначный рабочий массив). Его значение указывает ограничение по максимальному количеству подынтерваловnmax.Значение
ipar(5)должно соответствовать ограничениюipar(5)>=nmax*nsizef, гдеnsizef=4 + 3*M + (5+collpnt*N)*(collpnt*N+M) + (2*M- nrec)*2*M(nrec- количество граничных условий с правой стороны).- ndimi: ipar(6)
Задаёт размер
ispace(целочисленный рабочий массив). Это значение указывает ограничение поnmax, максимальному количеству подынтервалов.Значение
ipar(6)должно соответствовать ограничениюipar(6)>=nmax*nsizei, гдеnsizei= 3 + collpnt*N + M.- iprint: ipar(7)
контроль на выходе, может принимать следующие значения:
- -1
для полной диагностической распечатки
- 0
для избранной распечатки
- 1
для отказа от распечатки
- iread: ipar(8)
- = 0
заставляет
bvodeгенерировать равномерную исходную сетку.- = xx
другие значения в Scilab'е пока не реализованы
- = 1
если исходная сетка указана пользователем, то она будет определена в
fspaceследующим образом: сетка будет заниматьfspace(1), ..., fspace(n+1). Пользователю нужно предоставить только внутренние точки сеткиfspace(j) = x(j), j = 2, ..., n.- = 2
если исходная сетка представлена пользователем как в случае
ipar(8)=1, и, к тому же, никакого выбора адаптивной сетки не делается.
- iguess: ipar(9)
- = 0
если никакого первоначального предположения для решения не предоставлено.
- = 1
если первоначальное предположение предоставлено пользователем с помощью аргумента
guess.- = 2
если исходная сетка и коэффициенты приближённого решения предоставлены пользователем в
fspace(прежняя и новая сетки одни и те же).- = 3
если прежняя сетка и коэффициенты приближённого решения предоставлены пользователем в
fspace, а новая сетка взята в два раза реже, то есть каждая вторая точка из прежней сетки.- = 4
если в дополнение к прежней исходной сетке и коэффициента приближённого решения также предоставлена новая сетка в
fspace(см. описание выходных данных для более подробной информации по iguess = 2, 3 и 4).
- ireg: ipar(10)
- = 0
если задача является регулярной
- = 1
если первый коэффициент релаксации равен
ireg, и нелинейная итерация не зависит от прошлой сходимости (использовать только для сверхчувствительных нелинейных задач) only).- = 2
если вы хотите возврата немедленно при (а) двух, следующих друг за другом, несходимостях, либо (б) после получения ошибочной оценки в первый раз.
- nfxpnt: ipar(11)
указывает количество фиксированных точек в сетке, отличных от
x_lowиx_up(размерностьfixpnt).ipar(11)должна быть установлена равной размерности аргументаfixpntили равной0. В последнем случае фактическое значение будет автоматически установлено равнымsize(fixpnt,'*').
- ltol
массив размерности
ntol=ipar(4).ltol(j) = lопределяет, чтоj-тый допуск в массивеtolуправляет ошибкой вl-том элементе .
Также требуется, чтобы:
.
Также требуется, чтобы:1 <= ltol(1) < ltol(2) < ... < ltol(ntol) <= M- tol
массив размерности
ntol=ipar(4).tol(j)допуск ошибки вltol(j)-том элементе .
Таким образом код пытается удовлетворить
.
Таким образом код пытается удовлетворить
 в каждом подынтервале, где
в каждом подынтервале, где - вектор приближённого решения, а
- вектор приближённого решения, а
 - точное решение (неизвестное).
- точное решение (неизвестное).- fixpnt
массив размером
nfxpnt=ipar(11). Он содержит точки отличные отx_lowиx_up, которые нужно включить во все сетки. Код требует, чтобы все точки дополнительных условий, отличные отx_lowиx_up(см. описаниеzeta) были включены в качестве фиксированных точек вfixpnt.- fsub
Внешняя функция, используемая для вычисления вектор-столбца
f= ,
для всех
,
для всех xтаких, чтоx_low<=x<=x_upи для любыхz=z(u(x))(см. описание ниже).Внешняя функция должна иметь заголовки:
В Fortran последовательность вызова должна быть:
subroutine fsub(x,zu,f) double precision zu(*), f(*),x
В C прототип функции должен быть:
void fsub(double *x, double *zu, double *f)
А в Scilab'е:
function f = fsub(x,zu,parameters)
- dfsub
Внешняя функция, используемая для вычисления якобиана от
f(x,z(u))в точкеx, гдеz(u(x))определена как дляfsub, и массивdfразмеромNнаMдолжен быть заполнен частными производными отf:
Внешняя функция должна иметь заголовки:
В Fortran вызывающая последовательность должна быть:
subroutine dfsub(x,zu,df) double precision zu(*), df(*),x
В C прототип функции должен быть:
void dfsub(double *x, double *zu, double *df)
И в Scilab'е:
function df = dfsub(x,zu,parameters)
- gsub
Внешняя функция, используемая для вычисления
 задавая z=
задавая z=

z = zeta(i)для1<=i<=M.Внешняя функция должна иметь заголовки:
В Fortran вызывающая последовательность должна быть:
subroutine gsub(i,zu,g) double precision zu(*), g(*) integer i
В C прототип функции должен быть:
void gsub(int *i, double *zu, double *g)
А в Scilab'е:
function g = gsub(i,zu,parameters)
Заметьте, что в отличие от
fвfsub, здесь только одно значение за вызов возвращается вg.
- dgsub
Внешняя функция, используемая для вычисления
i-той строки якобиана отg(x,u(x)), гдеz(u)такая, как дляfsub,iкак дляgsubаM-векторdgдолжен быть заполнен частными производными отg, то есть, для отдельного вызова вычисляется
Внешняя функция должна иметь заголовки:
В Fortran вызывающая последовательность должна быть:
subroutine dgsub(i,zu,dg) double precision zu(*), dg(*)
В C прототип функции должен быть:
void dgsub(int *i, double *zu, double *dg)
А в Scilab'е:
function dg = dgsub(i,zu,parameters)
- guess
Внешняя функция, используемая для вычисления исходной аппроксимации для
z(u(x))иdmval(u(x)), вектораmj-тых производных отu(x). Заметьте, что эта процедура используется только еслиipar(9) = 1, и тогда всеMэлементыzuиNэлементыdmvalдолжны быть вычислены для любогоxтакого, чтоx_low<=x<=x_up.Внешняя функция должна иметь заголовки:
В Fortran вызывающая последовательность должна быть:
subroutine guess(x,zu,dmval) double precision x,z(*), dmval(*)
В C прототип функции должне быть:
void fsub(double *x, double *zu, double *dmval)
А в Scilab'е:
function [dmval,zu] = fsub(x,parameters)
- <optional_args>
Необязательные аргументы, должны быть либо:
любой левой частью упорядоченной последовательности значений:
guess, dfsub, dgsub, fixpnt, ndimf, ndimi, ltol, tol, ntol,nonlin, collpnt, subint, iprint, ireg, ifailлибо любой последовательностью
arg_name=argvalueсarg_nameиз:guess,dfsub,dgsub,fixpnt,ndimf,ndimi,ltol,tol,ntol,nonlin,collpnt,subint,iprint,ireg,ifail.
Все эти аргументы за исключением
ifailописаны выше.ifailможет использоваться для отображения вызова bvode в соответствии с выбранными необязательными аргументами. Еслиguessзадано, тоiguessравно 1.
Описание
Эти функции решают задачу многоточечных граничных значений для системы ОДУ смешанного порядка, заданной как:
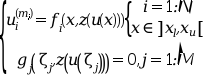
где:
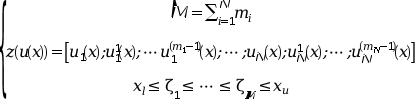
Аргумент zu, используемый внешними функциями и возвращаемый
bvode, является вектор-столбцом, сформированным элементами
z(u(x)) для заданных x.
Метод, используемый для аппроксимации решения, u является
коллокацией в гауссовских точках, требующих m(i)-1 непрерывных
производных в i-том элементе, i = 1:N. Здесь,
k - количество точек коллокации (этапов) на подынтервале, и оно
выбирается так, чтобы k ≥ max(m(i)).
Используется представление решения одночленного решения Рунге-Кутты.
Примеры
Первые две задачи взяты из [1] раздела Литература.
Задача 1 описывает однородно нагруженную балку переменной жёсткости просто поддерживаемую на обоих концах.
Она может быть определена следующим образом.
Решим дифференциальное уравнение четвёртого порядка:

Налагаемые граничные условия:
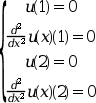
Известно точное решение этой задачи:

N = 1; // только одно дифференциальное уравнение m = 4; // дифференциальное уравнение четвёртого порядка M = sum(m); x_low = 1; x_up = 2; // пределы x zeta = [x_low,x_low,x_up,x_up]; // два ограничения (на значение u и его вторую производную) на каждой границе. // Внешние функции // Эти функции вызываются программой решения с zu=[u(x);u'(x);u''(x);u'''(x)] // - Функция, которая вычисляет правую сторону дифференциального уравнения function f=fsub(x, zu) f = (1 - 6*x^2*zu(4) - 6*x*zu(3)) / x^3 endfunction // - Функция, которая вычисляет производную fsub по zu function df=dfsub(x, zu) df = [0,0,-6/x^2,-6/x] endfunction // - Функция, которая вычисляет i-тое ограничение для заданной i function g=gsub(i, zu), select i case 1 then // x = zeta(1) = 1 g = zu(1) // u(1)=0 case 2 then // x = zeta(2) = 1 g = zu(3) // u''(1) = 0 case 3 then // x = zeta(3) = 2 g = zu(1) // u(2) = 0 case 4 then // x = zeta(4) = 2 g = zu(3) // u''(2) = 0 end endfunction // - Функция, которая вычисляет производную gsub по z function dg=dgsub(i, z) select i case 1 then // x = zeta(1) = 1 dg = [1,0,0,0] case 2 then // x = zeta(2) = 1 dg = [0,0,1,0] case 3 then // x = zeta(3) = 2 dg = [1,0,0,0] case 4 then // x = zeta(4) = 2 dg = [0,0,1,0] end endfunction // - Функция, которая вычисляет начальное предположение, здесь не используемое function [zu, mpar]=guess(x) zu = 0; mpar = 0; endfunction // определим функцию, которая вычисляет точное значение u для заданного x (в целях проверки) function zu=trusol(x) zu = 0*ones(4,1) zu(1) = 0.25*(10*log(2)-3)*(1-x) + 0.5 *( 1/x + (3+x)*log(x) - x) zu(2) = -0.25*(10*log(2)-3) + 0.5 *(-1/x^2 + (3+x)/x + log(x) - 1) zu(3) = 0.5*( 2/x^3 + 1/x - 3/x^2) zu(4) = 0.5*(-6/x^4 - 1/x/x + 6/x^3) endfunction fixpnt = []; // Все граничные условия находятся в x_low и x_up // nonlin collpnt n ntol ndimf ndimi iprint iread iguess rstart nfxpnt ipar = [0 0 1 2 2000 200 1 0 0 0 0 ] ltol = [1,3]; // установка контроля допуска на zu(1) и zu(3) tol = [1.e-11,1.e-11]; // установка значений допуска для контроля допуска xpoints = x_low:0.01:x_up; zu = bvode(xpoints, N, m, x_low,x_up, zeta, ipar, ltol,tol, fixpnt,... fsub, dfsub, gsub, dgsub, guess) //проверка ограничений zu([1,3],[1 $]) // должно быть нулевым plot(xpoints, zu(1,:)) // процесс решения u zu1 = []; for x = xpoints zu1 = [zu1,trusol(x)]; end norm(zu-zu1)
Та же задача с использованием
bvodeSи начальным предположением.Задача 2 описывает малую конечную деформацию тонкой мелкой сферической чаши постоянной толщины, подверженной квадратично меняющемуся асимметричному распределению внешнего давления. Здесь φ описывает изменение угла по меридиану деформированной стенки, а ψ является функцией напряжений. Для ε = μ = 10-3 можно найти два различных решения в зависимости от точки начала.
Граничные условия:
для
x=0иx=1N = 2; // два дифференциальных уравнения m = [2 2]; // каждое дифференциальное уравнение второго порядка M = sum(m); x_low = 0; x_up = 1; // пределы по x zeta = [x_low,x_low, x_up x_up]; // два ограничения на каждой границе // Внешние функции // Эти функции вызываются программой решения с zu = [u1(x) ; u1'(x) ; u2(x) ; u2'(x)] // - Функция, которая вычисляет правую сторону дифференциального уравнения function f=fsub2(x, zu, eps, dmu, eps4mu, gam, xt), f = [zu(1)/x^2-zu(2)/x+(zu(1)-zu(3)*(1-zu(1)/x)-gam*x*(1-x^2/2))/eps4mu //phi'' zu(3)/x^2-zu(4)/x+zu(1)*(1-zu(1)/(2*x))/dmu];//psi'' endfunction // - Функция, которая вычисляет производную от fsub по zu function df=dfsub2(x, zu, eps, dmu, eps4mu, gam, xt), df = [1/x^2+(1+zu(3)/x)/eps4mu, -1/x, -(1-zu(1)/x)/eps4mu, 0 (1-zu(1)/x)/dmu 0 1/x^2 -1/x]; endfunction // - Функция, которая вычисляет i-тое ограничение для заданного i function g=gsub2(i, zu), select i case 1 then // x = zeta(1) = 0 g = zu(1) // u(0) = 0 case 2 then // x = zeta(2) = 0 g = -0.3*zu(3) // x*psi'-0.3*psi+0.7x = 0 case 3 then // x = zeta(3) = 1 g = zu(1) // u(1) = 0 case 4 then //x=zeta(4)=1 g = 1*zu(4) - 0.3*zu(3) + 0.7*1 // x*psi'-0.3*psi+0.7x = 0 end endfunction // - Функция, которая вычисляет производную от gsub по z function dg=dgsub2(i, z) select i case 1 then // x = zeta(1) = 1 dg = [1,0,0,0] case 2 then // x = zeta(2) = 1 dg = [0,0,-0.3,0] case 3 then // x = zeta(3) = 2 dg = [1,0,0,0] case 4 then // x = zeta(4) = 2 dg = [0,0,-0.3,1] end endfunction gam = 1.1 eps = 1d-3 dmu = eps eps4mu = eps^4/dmu xt = sqrt(2*(gam-1)/gam) fixpnt = []; // все граничные условия размещены в x_low и x_up collpnt = 4; nsizef = 4 + 3*M + (5+collpnt*N)*(collpnt*N+M)+(2*M-2)*2*M ; nsizei = 3 + collpnt*N+M; nmax = 200; // nonlin collpnt n ntol ndimf ndimi iprint iread iguess rstart nfxpnt ipar = [1 collpnt 10 4 nmax*nsizef nmax*nsizei -1 0 0 0 0 ]; ltol = 1:4; // установка контроля допусков на zu(1), zu(2), zu(3) и zu(4) tol = [1.e-5,1.e-5,1.e-5,1.e-5]; // установка значений допусков для этих четырёх значений контроля xpoints = x_low:0.01:x_up; // - Функция, которая вычисляет начальное предположение, здесь не используемое function [zu, dmval]=guess2(x, gam), cons = gam*x*(1-x^2/2) dcons = gam*(1-3*x^2/2) d2cons = -3*gam*x dmval = zeros(2,1) if x>xt then zu = [0 0 -cons -dcons] dmval(2) = -d2cons else zu = [2*x;2;-2*x+cons;-2*dcons] dmval(2) = d2cons end endfunction zu = bvode(xpoints, N, m, x_low, x_up, zeta, ipar, ltol, tol, fixpnt,... fsub2, dfsub2, gsub2, dgsub2, guess2); scf(1); clf(); plot(xpoints, zu([1 3],:)) // процесс решения phi и psi //использование начального предположения ipar(9) = 1; // iguess zu2 = bvode(xpoints, N, m, x_low, x_up, zeta, ipar, ltol, tol, fixpnt,... fsub2, dfsub2, gsub2, dgsub2, guess2); scf(2); clf(); plot(xpoints, zu2([1 3],:)) // процесс решения phi и psi
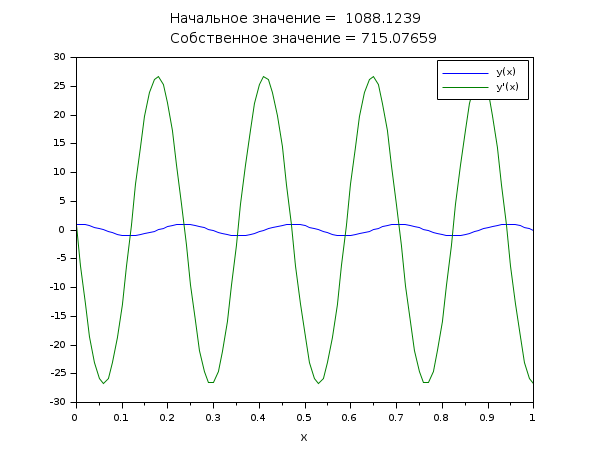
Задача нахождения собственных значений
// y''(x) = -la*y(x) // BV: y(0)=y'(0); y(1)=0 // Собственные функции и собственные значения y(x,n)=sin(s(n)*(1-x)), la(n)=s(n)^2, // где s(n) - нули f(s,n)=s+atan(s)-(n+1)*pi, n=0,1,2,... // Чтобы получить третье граничное условие, мы выбираем y(0)=1 // (с y(x) также c*y(x) является решением для каждой константы c.) // Решим следующую систему ОДУ: // y'' = -la*y // la' = 0 // BV: y(0)=y'(0), y(0)=1; y(1)=0 // z = [y(x) ; y'(x) ; la] function rhs=fsub(x, z) rhs = [-z(3)*z(1) ; 0] endfunction function g=gsub(i, z) g = [z(1)-z(2), z(1)-1, z(1)] g = g(i) endfunction // Следующая начальная функция годится для первых 8 собственных функций. function [z, lhs]=ystart(x, z, la0) z = [1 ; 0 ; la0] lhs = [0 ; 0] endfunction a = 0; b = 1; m = [2;1]; n = 2; zeta = [a a b]; N = 101; x = linspace(a,b,N)'; // Имеем s(n)-(n+1/2)*pi -> 0 для n, стремящемся к бесконечности. la0 = evstr(x_dialog('n-ное собственное значение: n= ?','10')); la0 = (%pi/2+la0*%pi)^2; z = bvodeS(x, m, n, a, b, fsub, gsub, zeta, ystart=list(ystart,la0)); // Тот же вызов без вывода на экран z = bvodeS(x, m, n, a, b, fsub, gsub, zeta, ystart=list(ystart,la0), iprint=1); // Тот же вызов с подробным выводом на экран z = bvodeS(x, m, n, a, b, fsub, gsub, zeta, ystart=list(ystart,la0), iprint=-1); clf() plot(x, [z(1,:)' z(2,:)']) xtitle(['Начальное значение = '+string(la0);'Собственное значение = '+string(z(3,1))],'x',' ') legend(['y(x)';'y''(x)']);
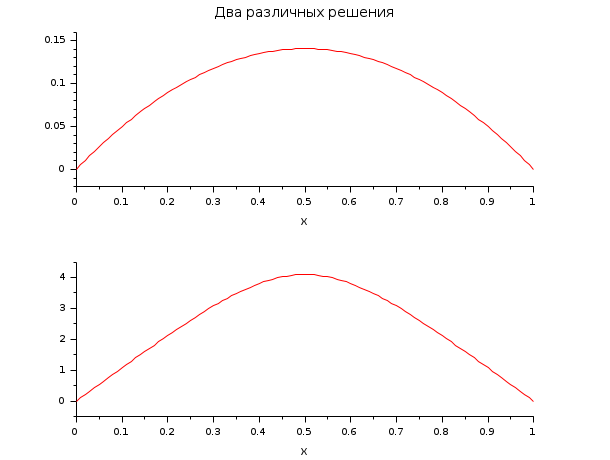
Краевая задача, у которой решений больше одного
// DE: y''(x)=-exp(y(x)) // BV: y(0)=0; y(1)=0 // Эта краевая задача имеет более одного решения. // Показано как найти два из них с помощью некоторой // предварительной информации о решениях y(x) для построения функции ystart. // z=[y(x);y'(x)] [a, b, m, n] = (0, 1, 2, 1); zeta = [a b]; N = 101; tol = 1e-8*[1 1]; x = linspace(a,b,N); function rhs=fsub(x, z), rhs=-exp(z(1)); endfunction function g=gsub(i, z) g = [z(1) z(1)] g = g(i) endfunction function [z, lhs]=ystart(x, z, M) //z = [4*x*(1-x)*M ; 4*(1-2*x)*M] z = [M;0] //lhs = [-exp(4*x*(1-x)*M)] lhs = 0 endfunction for M = [1 4] if M==1 z = bvodeS(x, m, n, a, b, fsub, gsub, zeta, ystart=list(ystart,M), tol=tol); else z1 = bvodeS(x, m, n, a, b, fsub, gsub, zeta, ystart=list(ystart,M), tol=tol); end end // Интегрирование ОДУ даёт, например, два решения yex и yex1. function y=f(c) y = c.*(1-tanh(sqrt(c)/4).^2) - 2; endfunction c = fsolve(2,f); function y=yex(x, c) y = log(c/2*(1-tanh(sqrt(c)*(1/4-x/2)).^2)) endfunction function y=f1(c1) y = 2*c1^2+tanh(1/4/c1)^2 - 1; endfunction c1 = fsolve(0.1, f1); function y=yex1(x, c1) y = log((1-tanh((2*x-1)/4/c1).^2)/2/c1/c1) endfunction disp('norm(yex(x)-z(1,:))= ', norm(z(1,:)-yex(x))) disp('norm(yex1(x)-z1(1,:))= ', norm(z1(1,:)-yex1(x))) clf subplot(2,1,1) plot2d(x, z(1,:), style=5) xtitle('Два различных решения','x',' ') subplot(2,1,2) plot2d(x, z1(1,:), style=5) xtitle(' ','x',' ')
Многоточечная краевая задача
// DE y'''(x)=1 // z=[y(x);y'(x);y''(x)] // BV: y(-1)=2 y(1)=2 // Дополнительное условие: y(0)=1 [a, b, c] = (-1, 1, 0); // Точка дополнительного условия c должна быть включена в массив fixpnt. [m, n] = (3, 1); function rhs=fsub(x, z) rhs = 1 endfunction function g=gsub(i, z) g = [z(1)-2 z(1)-1 z(1)-2] g = g(i) endfunction N = 10; zeta = [a c b]; x = linspace(a,b,N); z = bvodeS(x, m, n, a, b, fsub, gsub, zeta, fixpnt=c); function y=yex(x) y = x.^3/6 + x.^2 - x./6 + 1 endfunction disp(norm(yex(x)-z(1,:)),'norm(yex(x)-z(1,:))= ')
Квантовое уравнение Неймана с 2 "собственными значениями" (c_1 и c2). Используется продолжение.
// Квантовое уравнение Неймана с 2 "собственными значениями" c_1 и c_2 // (c_1=v-c_2-c_3, где v - параметр, используемый в продолжении) // // diff(f,x,2) + (1/2)*(1/x + 1/(x-1) + 1/(x-y))*diff(f,x) // - (c_1/x + c_2/(x-1) + c_3/(x-y))* f(x) = 0 // diff(c_2,x)=0, diff(c_3,x) = 0 // // и 4 "граничных" условия: diff(f,x)(a_k)=2*c_k*f(a_k) для // k=1,2,3, a_k=(0, 1 , y) и нормировка f(1) = 1 // // Вектор z - это z_1=f, z_2=diff(f,x), z_3=c_2 и z_4=c_3 // Предположение выбирается так, чтобы иметь один узел в интервале // [0,1], f(x)=2*x-1 такая, что f(1)=1, c_2 и c_3 выбираются так, // чтобы исключить полюсы в дифференциальном уравнении в 1.0 и // y, z_3=1, z_4=1/(2*y-1) // См.: http://arxiv.org/pdf/hep-th/0407005 y = 1.9d0; eigens = zeros(3,40); // Для хранения результатов // Общая настройка bvode // Количество дифференциальных уравнений ncomp = 3; // Порядки уравнений m = [2, 1, 1]; // Нелинейная задача ipar(1) = 1; // Количество точек коллокации ipar(2) = 3; // Исходная сетка из 4 подынтервалов ipar(3) = 4; ipar(8) = 0; // Размер fspace, ispace, см. colnew.f для изменения размера ipar(5) = 30000; ipar(6) = 2000; // Средний вывод данных ipar(7) = 0; // Есть исходное приближение ipar(9) = 1; // fixpnt - это массив, содержащий все фиксированные точки в сетке, в // частности, "граничные" точки, за исключением aleft и aright, ipar[11] // её размер, здесь только одна внутренняя "граничная точка" ipar(11) = 1; fixpnt = [1.0d0]; // Допустимые отклонения для всех элементов z_1, z_2, z_3, z_4 ipar(4) = 4; // Проверка допустимого отклонения для f и diff(f,x) и для c_2 и c_3 ltol = [1, 2, 3, 4]; tol = [1d-5, 1d-5, 1d-5, 1d-5]; // Определение дифференциальных уравнений function f=fsub(x, z) f = [ -.5*(1/x+1/(x-1)+1/(x-y))*z(2) +... z(1) * ((v-z(3)-z(4))/x + z(3)/(x-1) + z(4)/(x-y)), 0, 0]; endfunction function df=dfsub(x, z) df = [(v-z(3)-z(4))/x + z(3)/(x-1) + z(4)/(x-y),... -.5*(1/x+1/(x-1)+1/(x-y)),z(1)/(x*(x-1)),z(1)*y/(x*(x-y));... 0,0,0,0;0,0,0,0]; endfunction // Граничные условия function g=gsub(i, z) select i case 1, g = z(2) - 2*z(1)*(v-z(3)-z(4)) case 2, g = z(2) - 2*z(1)*z(3) case 3, g = z(1)-1. case 4, g = z(2) - 2*z(1)*z(4) end endfunction function dg=dgsub(i, z) select i case 1, dg = [-2*(v-z(3)-z(4)),1.,2*z(1),2*z(1)] case 2, dg = [-2*z(3),1.,-2*z(1),0] case 3, dg = [1,0,0,0] case 4, dg = [-2*z(4),1.,0,-2*z(1)] end endfunction // Начало вычисления // Положения краевых условий, отсортированные zeta = [0.0d0, 1.0d0, 1.0d0, y]; // Края интервала aleft = 0.0d0; aright = y; // Массив из 40 значений v, исследуемых продолжением, и массив из 202 // точек, в которых следует вычислить функцию f. valv = [linspace(0,.9,10) logspace(0,2,30)]; res = [linspace(0,.99,100) linspace(1,y,101)]; // Собственные состояния характеризуются количеством узлов на интервале // [0,1] и на [1,y], здесь предполжение выбирает один узел (ноль) на // интервале [0,1] с линейной функцией f(x)=2*x-1 и константами c_2, c_3, // так что dmval=0. Заметьте, что вектор z имеет mstar = 4 элементов, // в то время как dmval имеет ncomp = 3 элемента. function [z, dmval]=guess(x) z = [2*x-1, 2., 1., 1/(2*y-1)] dmval = [0,0,0] endfunction // Первое выполнение имеет ipar(9)=1 и использует предположение // Последующие выполнения имеют ipar(9)=3 и используют продолжение. // Это выполняется в плотно закрытом цикле, чтобы не нарушить стек for i = 1:40 v = valv(i); sol = bvode(res, ncomp, m, aleft, aright, zeta, ipar, ltol, tol, fixpnt,... fsub, dfsub, gsub, dgsub, guess); eigens(:,i) = [v;sol(3,101);sol(4,101)]; // c_2 и c_3 являются константами! ipar(9) = 3; end // Чтобы увидеть изменение собственных значений с v, disp(eigens) // Обратите внимание на то, что они изменяются гладко. // Чтобы увидеть решение f для v=40, disp(sol(1,:)). // Обратите внимание на то, что оно исчезает точно один раз в // [0,1] в x близком 0.98, и становится очень малым, когда // x -> 0 и очень большим, когда x -> y. // Это явно отличается от случая при малом v. // Процедура продолжения позволяет исследовать эти экспоненциальные // поведения без перехода в другие собственные состояния.
Используемые функции
Эта функция основана на процедуре Fortran
colnew, разработанной
U. Ascher, Department of Computer Science, University of British Columbia, Vancouver, B.C. V6T 1W5, Canada
G. Bader, institut f. Angewandte mathematik university of Heidelberg; im Neuenheimer feld 294d-6900 Heidelberg 1
Литература
U. Ascher, J. Christiansen and R.D. Russell, collocation software for boundary-value ODEs, acm trans. math software 7 (1981), 209-222. this paper contains EXAMPLES where use of the code is demonstrated.
G. Bader and U. Ascher, a new basis implementation for a mixed order boundary value ode solver, siam j. scient. stat. comput. (1987).
U. Ascher, J. Christiansen and R.D. Russell, a collocation solver for mixed order systems of boundary value problems, math. comp. 33 (1979), 659-679.
U. Ascher, J. Christiansen and R.D. russell, colsys - a collocation code for boundary value problems, lecture notes comp.sc. 76, springer verlag, b. children et. al. (eds.) (1979), 164-185.
C. Deboor and R. Weiss, solveblok: a package for solving almost block diagonal linear systems, acm trans. math. software 6 (1980), 80-87.
Смотрите также
| Report an issue | ||
| << Дифференциальное счисление, интегрирование | Дифференциальное счисление, интегрирование | dae >> |