Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
PID
PID レギュレータ
ブロックのスクリーンショット

パレット
説明
このブロックは PID (比例-積分-微分)制御器を実装します. "誤差"の値 Ue は,観測されたプロセス変数 Upr とセットポイント指令値 Ur の差から計算します.

制御目的は,プロセス変数 Up をセットポイント値 Urに追従させることです. PID制御器は,工業プロセスのフィードバック制御において 広く使用されています.
PID制御器の計算(アルゴリズム)には以下の3つのパラメータの値が含まれます; 比例 Kp, 積分 Ki, 微分 Kd. これらの項は,誤差信号Ueに適用する3種類の基本的な数学関数を 記述します. Kp はカレントの誤差への反応を定義, Ki は最近の誤差の合計への反応を定義, Kd は誤差の変化率への反応を定義します.
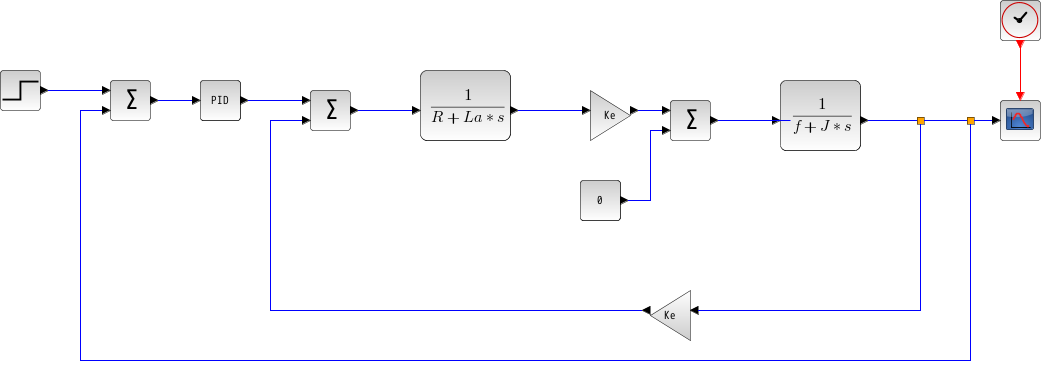
制御バルブまたは加熱要素の供給電力のような制御要素を通じて プロセスを調整するために, これらの3種類の処理の重み付き加算が使用されます. 従来のフィードバック制御系の基本構造を以下に示します:
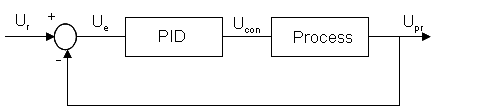
PID 則は入力変数 Up(t), その時間積分 Ui(t), その1階微分 Ud(t) の線形結合です. 制御則 Ucon(t) は以下の形式を有します:
ダイアログボックス
比例
誤差を乗じるゲインの値.
プロパティ : 大きさ-1の'vec'型.
積分
誤差の積分時間の値.(1/Integral)
プロパティ : 大きさ -1 の'vec'型.
微分
誤差の微分時間の値.
プロパティ : 大きさ-1の'vec'型.
デフォルトプロパティ
常にアクティブ: no
直達項: no
ゼロ交差: no
モード: no
標準入力:
- ポート 1 : 大きさ [-1,-2] / 1型
標準出力:
- ポート 1 : 大きさ [-1,-2] / 1型
アクティベーション入力の数/大きさ: 0
アクティベーション出力の数/大きさ: 0
連続時間状態量: no
離散時間状態量: no
オブジェクト離散時間状態量: no
計算用関数の名前: csuper
インターフェイス用関数
SCI/modules/scicos_blocks/macros/Linear/PID.sci
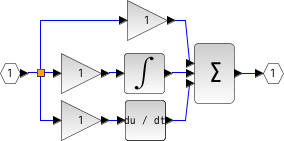
コンパイル済みのスーパーブロックの内容
例
例1
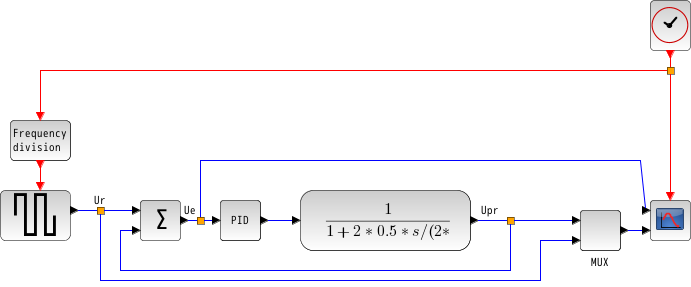
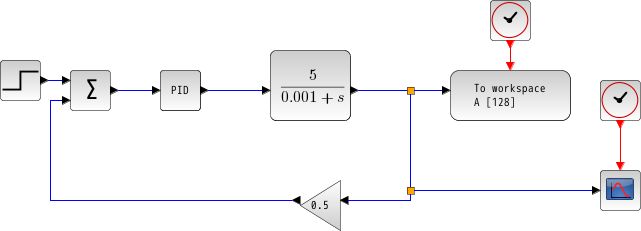
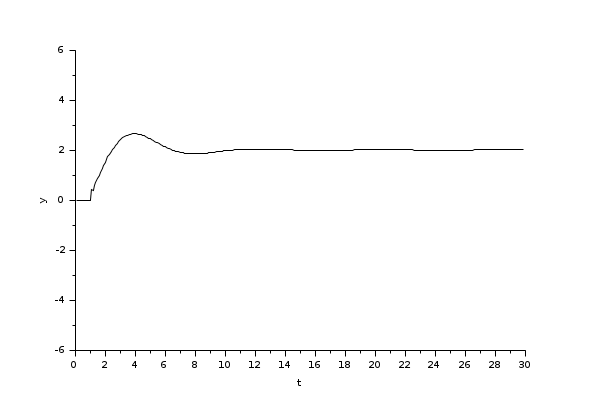
この例は,PIDレギュレータの使用例を示します. この制御は,簡単に出力信号 Upr(t) を指令信号 Ur(t) に一致させます.
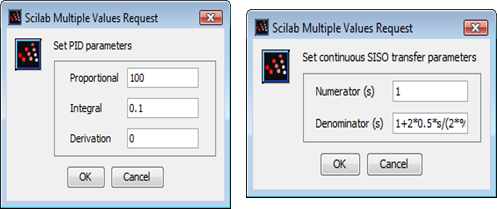
この例では,制御系は, ダンピング係数 = 0.5, カットオフ周波数 fc = 100 Hzの 2次の単位ゲインローパスフィルタです. 伝達関数 H(s) を以下に示します:
このフィルタをモデル化するには,連続時間システムパレットの 連続系伝達関数ブロック (CLR)を使用します.
PID パラメータ Kp, Ki および Kd を 100, 0.1 および 0に設定します.
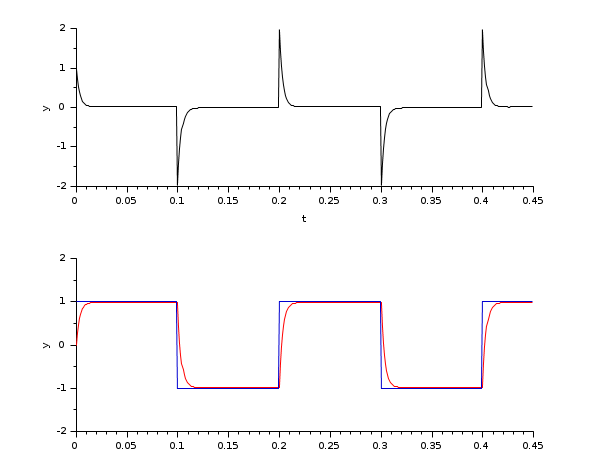
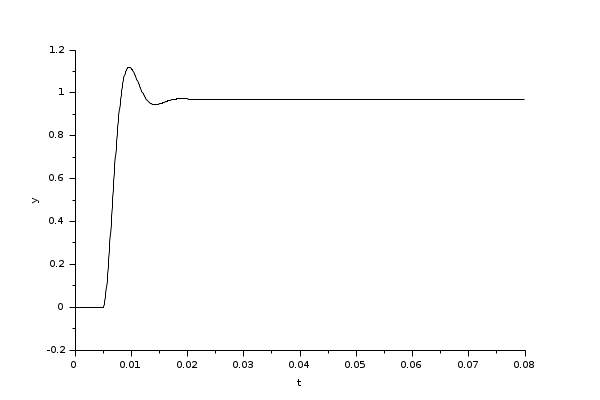
スコープはシステム誤差 Ue (黒), 基準信号 Ur (青) およびプロセス信号 Upr(赤) の波形を表示します. 最初,プロセス信号 Upr(t) が基準信号 Ur(t) に追従していないことが わかります.
例2
例3
| Report an issue | ||
| << INTEGRAL_m | Continuous time systems palette | TCLSS >> |