Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
PID
Régulateur PID
Aperçu

Contenu
Palette
Description
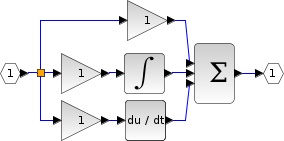
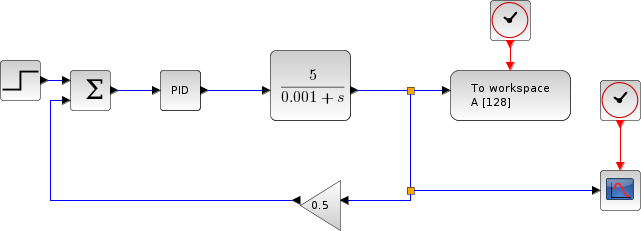
Ce bloc implante un régulateur PID. Le calcul (algorithme) du régulateur PID invoque trois paramètres séparés; Les coefficients d'action Proportionnelle, Intégrale et Dérivée. Le coefficient d'action Proportionnelle détermine la réaction à l'erreur courante, l'Intégrale détermine la réaction à la somme des erreurs récentes et la Dérivée détermine la réaction à la vitesse à laquelle l'erreur est modifiée. La somme pondérée de ces trois actions est utilisée pour ajuster le processus à travers un élément de contrôle tel que la position d'une vanne de régulation ou l'alimentation de puissance d'un élément chauffant.
Boîte de dialogue
Proportional
La valeur du gain qui multiplie l'erreur.
Propriétés Type 'vec' de taille -1.
Integral
La valeur du temps d'intégration de l'erreur.(1/Integral)
Propriétés Type 'vec' de taille -1.
Derivation
La valeur du temps de dérivation de l'erreur.
Propriétés Type 'vec' de taille -1.
Propriétés par défaut
always active: non
direct-feedthrough: non
zero-crossing: non
mode: non
regular inputs:
- port 1 : size [-1,-2] / type 1
regular outputs:
- port 1 : size [-1,-2] / type 1
number/sizes of activation inputs: 0
number/sizes of activation outputs: 0
continuous-time state: non
discrete-time state: non
object discrete-time state: non
name of computational function: csuper
Fonction d'interfaçage
SCI/modules/scicos_blocks/macros/Linear/PID.sci
Contenu du Superbloc compilé
| Report an issue | ||
| << INTEGRAL_m | Palette Systèmes à temps continu | TCLSS >> |