Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
xcos
ハイブリッドシミュレータ用のブロック図エディタおよびGUI
呼び出し手順
xcos() xcos(filename) xcos(scs_m_list)
モジュール
引数
filename : ダイアログファイル (拡張子: .cos, .cosf または .zcos)のパスを有する文字列. 入力引数が使用されない場合, 空のダイアグラムがオープンされます (デフォルト名: Untitled).
scs_m_list : 編集後のXcosダイアグラム構造体.
説明
Xcosはハイブリッド動的システムのモデル構築用の ビジュアルエディタです. モデルは, Xcos のGUIにより, 結合, 読み込み, 保存, コンパイル, シミュレートできます. Xcosは様々なブロックダイアグラムコンパイラおよびハイブリッドシミュレータ scicosimへのインターフェイスとして動作します.
Xcos環境には以下の要素があります:
エディタ
エディタにより,パレットで定義されたブロックから動的システムを表す フローチャートを設計することが可能となります. ユーザは標準ブロックをカスタマイズして, 新しいブロックを定義できます.
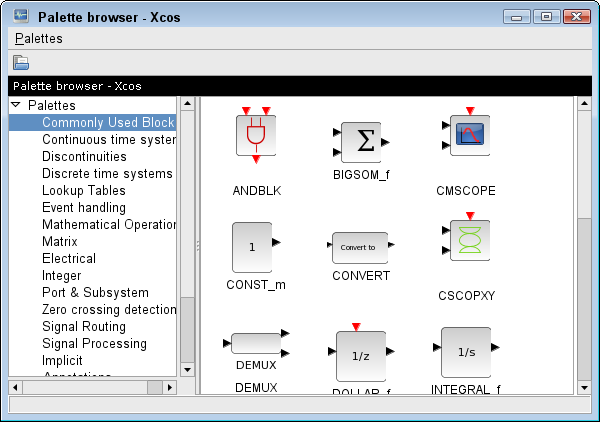
パレットブラウザ
パレットブラウザは, 全ての Xcos 標準ブロックを カテゴリ(信号処理, 電気, 水力, 微分, 積分, 等)によりグループ化して一覧を示します. 以下の図を参照ください.
コンパイラ/シミュレータ
Xcos 環境により, 離散, 連続, シンボル方程式(Modelica)により定義された,等, および 上記の機能を組み合わせた混合システムの 複雑なシステムのモデル構築からシミュレーションまでが可能になります. シミュレーションの結果のデータはリアルタイムでグラフィック表示でき, Scilabでポスト処理に使用することができます.
ツールバーアイコンでxcosを起動するには,
 Scilabメインウインドウのアプリケーションの
Xcosメニュー要素,または,
空のXcosウインドウをオープンする以下の例のようにします.
Scilabメインウインドウのアプリケーションの
Xcosメニュー要素,または,
空のXcosウインドウをオープンする以下の例のようにします.
xcos
既存のダイアグラムをオープンするには,この例のように 有効なファイル名を指定する必要があります:
xcos("SCI/modules/xcos/demos/bounce.zcos")
この例では,Xcosウインドウがオープンされ, bounce.zcosデモのダイアグラムが表示されます.
あるダイアグラム構造体が Scilabワークスペースに存在する場合, この例のようにオープンすることができます:
loadXcosLibs(); // define diagram structure scs_m = scicos_diagram(); scs_m.props.title = "Imported diagram"; scs_m.objs(1) = SUMMATION("define"); scs_m.objs(1).graphics.sz = [30 50]; xcos(scs_m);
ただし,scs_m はbounce.zcosのダイアグラム構造体です.
Xcos エディタと同時に開いた パレットブラウザで提供されるブロックを結合することにより モデルを構築します. このウインドウは以下のような外観になります.
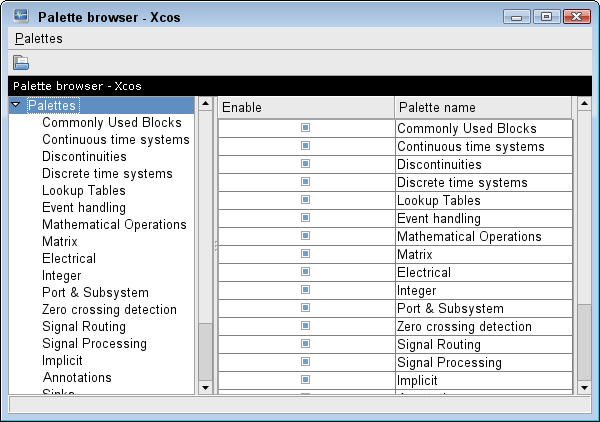
ウインドウの左の部分にある パレット タイトルを クリックすることにより表示されるパレットをカスタマイズすることができます. パレットウインドウは,パレットを個別に選択/非選択できる選択リストを表示します. 前の画面に戻るには, パレットのタイトルをクリックします.
Xcos はModelicaに基づくモデル用,およびユーザ定義のブロックおよびコード生成用に Cコンパイラを必要とします.
サポートされるコンパイラをインストールすることが推奨されます.
例
xcos(); xcos(SCI+"/modules/xcos/demos/Discrete-KalmanFilter.zcos"); scs_m = scicos_diagram(); scs_m.objs($+1) = BIGSOM_f("define"); xcos(scs_m);
| Report an issue | ||
| << Solvers | Xcos | xcos_debug_gui >> |