nanreglin
Régréssion linéaire
Séquence d'appel
[a,b]=nanreglin(x,y)
Paramètres
- x, y, a, b
Vecteurs or Matrices numériques.
Description
Résout le problème de régréssion y=a*x+b au sens des moindres carrés.
x et y sont deux matrices de taille
x(p,n) et y(q,n), où n
est le nombre d'échantillons.
L'estimateur a est une matrice de taille (q,p) et b est un
vecteur de taille (q,1).
Chaque ligne de y est traitée comme un problème indépendant, si x
ou y contient un NaN (x(i,j) = %nan ou y(i,j) = %nan),
alors x(:,j) et y(i,j) sont ignorés,
comme si le point [x(:,j); y(i,j)] n'existait pas.
Exemples
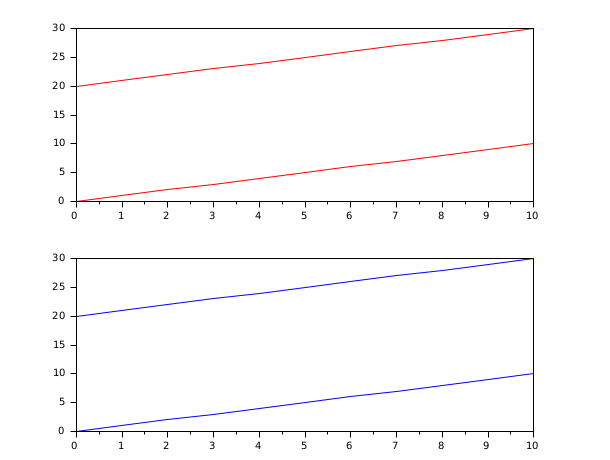
Exemple graphique #1 :
// Dans l'exemple suivant, les deux problèmes représentent deux lignes droites : // l'une va de (0,0) à (10,10) et l'autre va de (0,20) à (10,30). // reglin et nanreglin trouvent les mêmes valeurs parce-que tous les points sont alignés et les NaN ont été ignorés. subplot(211) x = 0:10; y = 20:30; [a1, b1] = reglin(x, [x ; y]); plot(x', (a1*x+repmat(b1,1,11))', "red") subplot(212) y2 = y; y2(2:10) = %nan; // Leaving y2(1) and y2(11) unchanged. [a2, b2] = nanreglin(x, [x ; y2]) plot(x', (a2*x+repmat(b2,1,11))', "blue")
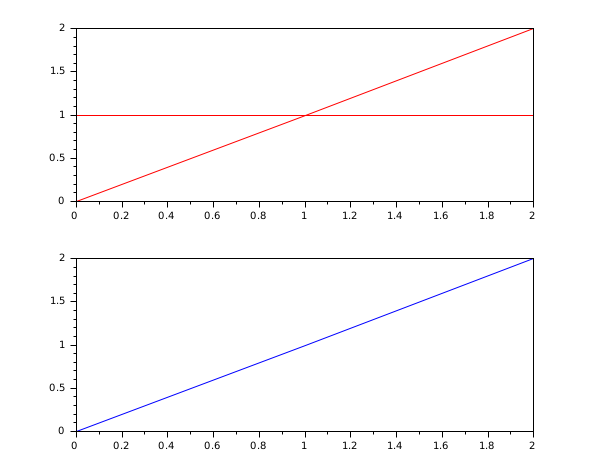
Exemple graphique #2 :
// Maintenant les deux problèmes représentent une ligne droite (reglin(x, x)) de (0,0) à (2,2), // mais alors que le deuxième argument du premier problème (reglin(x, y)) représente // une droite plate (d'équation y = 1), le second argument du deuxième problème // (reglin(x, y2)) ignore le point central de y (mis à %nan) donc la droite est maintenant // d'équation y = 0, parce-que les deux points restants sont (0,0) et (2,0). subplot(211) x = 0:2; y = [0 3 0]; [a1, b1] = reglin(x, [x ; y]); plot(x', (a1*x+repmat(b1,1,3))', "red") subplot(212) y2 = y; y2(2) = %nan; // y2 = [0 %nan 0]; [a2, b2] = nanreglin(x, [x ; y2]); plot(x', (a2*x+repmat(b2,1,3))', "blue")
Voir aussi
Historique
| Version | Description |
| 5.5.0 | Introduction |
| Report an issue | ||
| << nanmedian | Données incomplètes | nanstdev >> |