scicos_simulate
シミュレーションをバッチモードで実行する関数
呼び出し手順
Info=scicos_simulate(scs_m) Info=scicos_simulate(scs_m,Info) Info=scicos_simulate(scs_m,context) Info=scicos_simulate(scs_m,flag) Info=scicos_simulate(scs_m ,Info [, context] [,flag])
引数
- scs_m: ダイアグラムデータ構造体 (scs_m 構造体参照).
- Info: リスト.
初回コール時は
list(),次回コール以降はInfo出力をInfo入力として 指定してください.Infoにはコンパイルおよびシミュレーション関連情報 が含まれ,不要な再コンパイルを避けるために使用されます. - ContextValues: Scilab構造体で,コンテキストおよびxcosブロックで使用されるシンボル変数の値を有します.
- flag: 文字列. 'nw' (no window)の場合, グラフィックウインドウを使用するブロックは実行されません. このようなブロックのリストは,新規ブロック追加時に更新する必要があることに注意してください.
説明
この関数はバッチモードで xcos ダイアグラムをシミュレートする際に使用されます.
この関数には,.zcosファイルをScilabにロードした際に
得られる scs_m構造体を指定します
(importXcosDiagram参照).
ContextValuesは,主ダイアグラムコンテキストで
設定される主要なパラメータの値を変更する際に使用することができます.
例: 変数 A がダイアグラムの主コンテキストで
1に設定された場合, A の値を
scicos_simulate シミュレーション時に
以下のように設定することにより変更することができます.
ContextValues.A=2
ContextValues引数を使用せずに
Scilab内部で定義された変数を直接使用することも可能ですが,
このような用途の場合,コンテキストの定義でこれが可能である
ことが必要です: 例えば,パラメータAとして
Scilab変数Aの値を
使用するシミュレーションを可能としたい場合,
ダイアグラムコンテキストの定義に以下を記述する必要があります:
if ~exists('A') then A=1,end
Aのカレントの値に依存するという
弱点があることに注意してください.ファイルの内容
SCI/modules/scicos/macros/scicos_auto/scicos_simulate.sci
例
xcos diagram は, SCI/modules/xcos/demos/batch_simulation.zcosにあります.
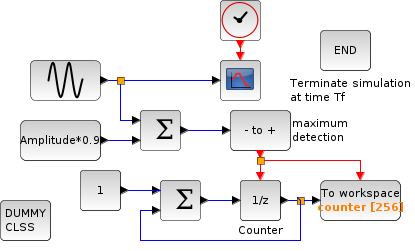
importXcosDiagram("SCI/modules/xcos/demos/batch_simulation.zcos") typeof(scs_m) //ダイアグラムデータ構造体 //このダイアグラムは以下の3つのコンテキスト変数を使用する : // Amplitude : sin関数の大きさ // Pulsation : sin関数の脈動 // Tf : シミュレーション終了時間 scs_m.props.context; //組込み定義 //ダイアグラムに埋め込まれたパラメータを用いたバッチシミュレーション(初回) scicos_simulate(scs_m); // 終了時間を変更 Context.Tf=10; scicos_simulate(scs_m,Context); // 表示なしに変更 Context.Tf=10; Context.Pulsation=9; scicos_simulate(scs_m,list(),Context,'nw'); // "from workspace block"で作成された変数を取得 counter
参照
- scs_m構造体 — scs_m構造体の定義
- importXcosDiagram — Import a Xcos diagram on Scilab
- scicosim: xcosバッチシミュレーション関数 — xcos (バッチ) シミュレーション関数
- xcos: ブロックダイアグラムエディタおよびハイブリッドシミュレータのGUI — ハイブリッドシミュレータ用のブロック図エディタおよびGUI
- steadycos: xcosダイアグラムの定常値を求める — xcosダイアグラムで記述された一般の動的システムの状態変数の 定常値を見つける
- lincos: xcosダイアグラムから線形状態空間モデルを線形化により構築 — Xcosダイアグラムにより記述された一般的な動的システムから 線形化により定義された線形状態空間モデル
| Report an issue | ||
| << lincos | Batch functions | scicosim >> |