Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
datafit
Parameter identification based on measured data
Calling Sequence
[p,err]=datafit([imp,] G [,DG],Z [,W],[contr],p0,[algo],[df0,[mem]], [work],[stop],['in'])
Arguments
- imp
scalar argument used to set the trace mode.
imp=0nothing (execpt errors) is reported,imp=1initial and final reports,imp=2adds a report per iteration,imp>2add reports on linear search. Warning, most of these reports are written on the Scilab standard output.- G
function descriptor (e=G(p,z), e: ne x 1, p: np x 1, z: nz x 1)
- DG
partial of G wrt p function descriptor (optional; S=DG(p,z), S: ne x np)
- Z
matrix [z_1,z_2,...z_n] where z_i (nz x 1) is the ith measurement
- W
weighting matrix of size ne x ne (optional; defaut no ponderation)
- contr
'b',binf,bsupwithbinfandbsupreal vectors with same dimension asp0.binfandbsupare lower and upper bounds onp.- p0
initial guess (size np x 1)
- algo
'qn'or'gc'or'nd'. This string stands for quasi-Newton (default), conjugate gradient or non-differentiable respectively. Note that'nd'does not accept bounds onx).- df0
real scalar. Guessed decreasing of
fat first iteration. (df0=1is the default value).- mem :
integer, number of variables used to approximate the Hessian, (
algo='gc' or 'nd'). Default value is around 6.- stop
sequence of optional parameters controlling the convergence of the algorithm.
stop= 'ar',nap, [iter [,epsg [,epsf [,epsx]]]]- "ar"
reserved keyword for stopping rule selection defined as follows:
- nap
maximum number of calls to
funallowed.- iter
maximum number of iterations allowed.
- epsg
threshold on gradient norm.
- epsf
threshold controlling decreasing of
f- epsx
threshold controlling variation of
x. This vector (possibly matrix) of same size asx0can be used to scalex.
- "in"
reserved keyword for initialization of parameters used when
funin given as a Fortran routine (see below).- p
Column vector, optimal solution found
- err
scalar, least square error.
Description
datafit is used for fitting data to a model. For
a given function G(p,z), this function finds the best
vector of parameters p for approximating
G(p,z_i)=0 for a set of measurement vectors
z_i. Vector p is found by minimizing
G(p,z_1)'WG(p,z_1)+G(p,z_2)'WG(p,z_2)+...+G(p,z_n)'WG(p,z_n)
datafit is an improved version of
fit_dat.
Examples
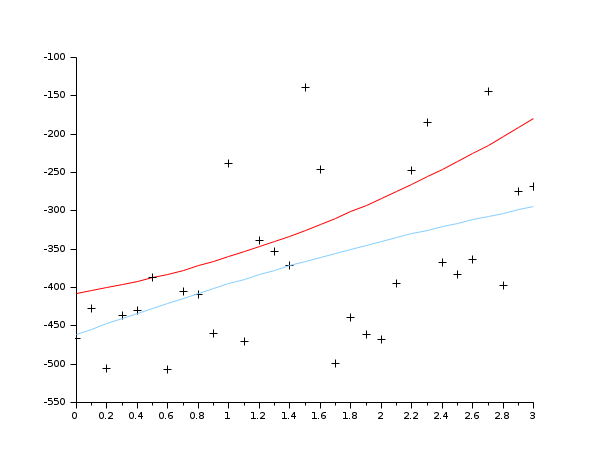
//generate the data function y=FF(x, p) y=p(1)*(x-p(2))+p(3)*x.*x endfunction X=[]; Y=[]; pg=[34;12;14] //parameter used to generate data for x=0:.1:3 Y=[Y,FF(x,pg)+100*(rand()-.5)]; X=[X,x]; end Z=[Y;X]; //The criterion function function e=G(p, z), y=z(1),x=z(2); e=y-FF(x,p), endfunction //Solve the problem p0=[3;5;10] [p,err]=datafit(G,Z,p0); scf(0);clf() plot2d(X,FF(X,pg),5) //the curve without noise plot2d(X,Y,-1) // the noisy data plot2d(X,FF(X,p),12) //the solution
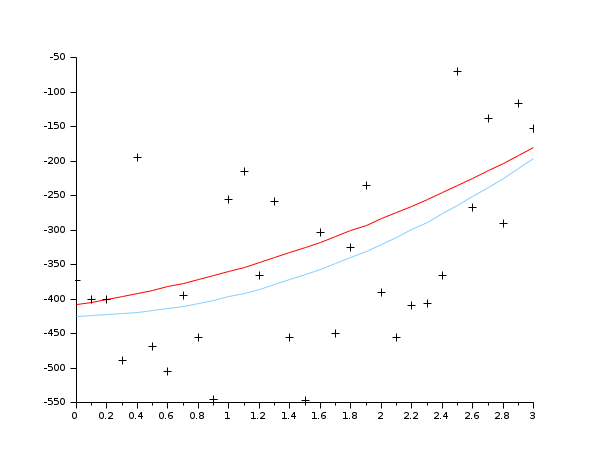
//generate the data function y=FF(x, p) y=p(1)*(x-p(2))+p(3)*x.*x endfunction //the gradient of the criterion function function s=DG(p, z), a=p(1),b=p(2),c=p(3),y=z(1),x=z(2), s=-[x-b,-a,x*x] endfunction function e=G(p, z), y=z(1),x=z(2); e=y-FF(x,p), endfunction X=[];Y=[]; pg=[34;12;14] for x=0:.1:3 Y=[Y,FF(x,pg)+100*(rand()-.5)]; X=[X,x]; end Z=[Y;X]; p0=[3;5;10] [p,err]=datafit(G,DG,Z,p0); scf(1); clf() plot2d(X,FF(X,pg),5) //the curve without noise plot2d(X,Y,-1) // the noisy data plot2d(X,FF(X,p),12) //the solution
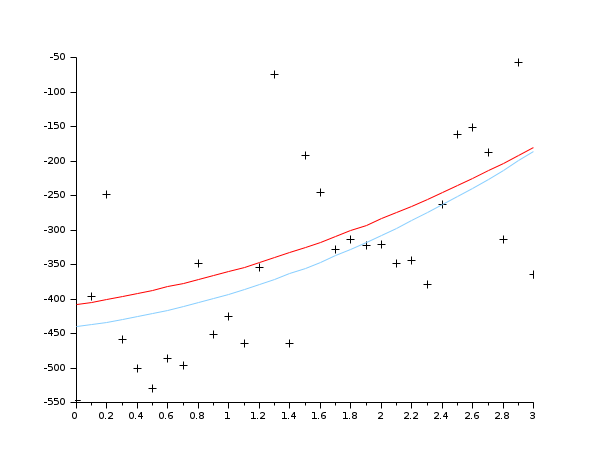
//generate the data function y=FF(x, p) y=p(1)*(x-p(2))+p(3)*x.*x endfunction //the gradient of the criterion function function s=DG(p, z), a=p(1),b=p(2),c=p(3),y=z(1),x=z(2), s=-[x-b,-a,x*x] endfunction function e=G(p, z), y=z(1),x=z(2); e=y-FF(x,p), endfunction X=[];Y=[]; pg=[34;12;14] for x=0:.1:3 Y=[Y,FF(x,pg)+100*(rand()-.5)]; X=[X,x]; end Z=[Y;X]; p0=[3;5;10] // Add some bounds on the estimate of the parameters // We want positive estimation (the result will not change) [p,err]=datafit(G,DG,Z,'b',[0;0;0],[%inf;%inf;%inf],p0,algo='gc'); scf(1); clf() plot2d(X,FF(X,pg),5) //the curve without noise plot2d(X,Y,-1) // the noisy data plot2d(X,FF(X,p),12) //the solution
See Also
| Report an issue | ||
| << Nonlinear Least Squares | Nonlinear Least Squares | fit_dat >> |