lqe
linear quadratic estimator (Kalman Filter)
Syntax
[K, X] = lqe(Pw) [K, X] = lqe(P, Qww, Rvv) [K, X] = lqe(P, Qww, Rvv, Swv)
Arguments
- Pw
A state space representation of a linear dynamical system (see syslin)
- P
A state space representation of a linear dynamical system (
nuinputs,nyoutputs,nxstates) (see syslin)- Qww
Real
nxbynxsymmetric matrix, the process noise variance- Rvv
full rank real
nybynysymmetric matrix, the measurement noise variance.- Swv
real
nxbynymatrix, the process noise vs measurement noise covariance. The default value is zeros(nx,ny).- K
a real matrix, the optimal gain.
- X
a real symmetric matrix, the stabilizing solution of the Riccati equation.
Description
This function computes the linear optimal LQ estimator gain of the state estimator for a detectable (see dt_ility) linear dynamical system and the variance matrices for the process and the measurement noises.
Syntax [K,X]=lqe(P,Qww,Rvv [,Swv])
Computes the linear optimal LQ estimator gain K for the dynamical system:


Where w and v are white noises such
as 
 | The values of B and D are not taken into account. |
 |
Standard form
![\mathbb{E}\left(\left[\begin{array}{l}w\\v\end{array}\right]\left[\begin{array}{ll}w](/docs/2023.1.0/en_US/_LaTeX_lqe.xml_4.png)
![\left[\begin{array}{l}B_w\\D_w\end{array}\right]
\left[\begin{array}{ll}B_w](/docs/2023.1.0/en_US/_LaTeX_lqe.xml_5.png)



Syntax [K,X]=lqe(Pw)
Computes the linear optimal LQ estimator gain K for the dynamical system

Where w is a white noise with unit covariance.
Properties
A + K.C is stable.
the state estimator is given by the dynamical system:

or
It minimizes the covariance of the steady state error
 .
.For discrete time systems the state estimator is such that:
 (one-step predicted
x).
(one-step predicted
x).
Algorithm
Let Q = BwBw', R = DwDw' and S = BwDw'
For the continuous time case K is given by: K = -(X.C'+ S).R-1
where
Xis the solution of the stabilizing Riccati equation(A - SR-1C)X + X(A - SR-1C)' - XC'R-1CX + Q - SR-1S'= 0
For the discrete time case K is given by K = - (A X C'+S)(C X C'+ R)+
where
Xis the solution of the stabilizing Riccati equationAXA'- X - (AXC' + S)(CXC' + R)+(CXA' + S') + Q
Examples
Assume the dynamical system formed by two masses connected by a spring and a damper:
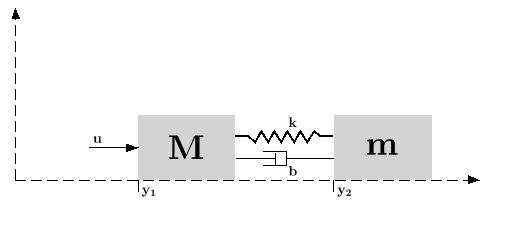
 (where e is a noise) is applied
to the big one, the deviations from equilibrium positions
dy1 and
dy2
of the masses are measured. These measures are also subject to an additional noise
v.
(where e is a noise) is applied
to the big one, the deviations from equilibrium positions
dy1 and
dy2
of the masses are measured. These measures are also subject to an additional noise
v.
A continuous time state space representation of this system is:
![\left\lbrace\begin{array}{l}
\dot{x}=\left[\begin{array}{llll}0&1&0&0\\ -k/M&-b/M&k/M&b/M\\ 0&0&0&1\\ k/m&b/m&-k/m&-b/m \end{array}\right] x +\left[\begin{array}{l}0\\ 1/M\\ 0\\ 0 \end{array}\right] (\bar{u}+e)\\
\left[\begin{array}{l}dy_1\\ dy_2\end{array}\right]=\left[\begin{array}{llll}1&0&0&0\\ 0&0&1&0 \end{array}\right] x +v
\end{array}\right.](/docs/2023.1.0/en_US/_LaTeX_lqe.xml_15.png)
![\text{Where }x=\left[\begin{array}{l}dy_1\\ \dot{dy_1}\\ dy_2\\ \dot{dy_2}\end{array}\right]](/docs/2023.1.0/en_US/_LaTeX_lqe.xml_16.png)

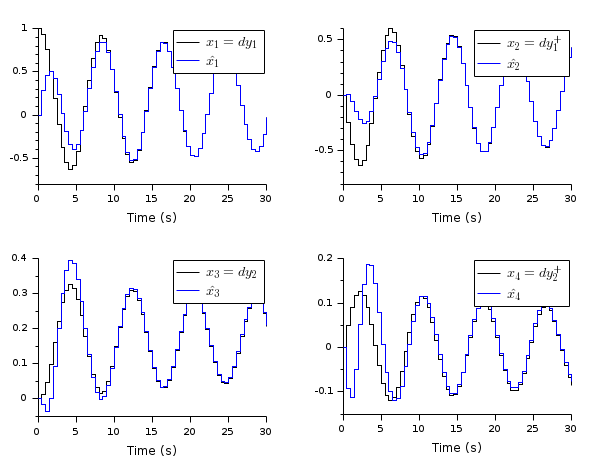
The instructions below can be used to compute a LQ state observer of the discretized version of this dynamical system.
// Form the state space model M = 1; m = 0.2; k = 0.1; b = 0.004; A = [ 0 1 0 0 -k/M -b/M k/M b/M 0 0 0 1 k/m b/m -k/m -b/m]; B = [0; 1/M; 0; 0]; C = [1 0 0 0 //dy1 0 0 1 0];//dy2 //inputs u and e; outputs dy1 and dy2 P = syslin("c",A, B, C); // Discretize it dt=0.5; Pd=dscr(P, dt); // Set the noise covariance matrices Q_e=0.01; //additive input noise variance R_vv=0.001*eye(2,2); //measurement noise variance Q_ww=Pd.B*Q_e*Pd.B'; //input noise adds to regular input u //----syntax [K,X]=lqe(P,Qww,Rvv [,Swv])--- Ko=lqe(Pd,Q_ww,R_vv); //observer gain //----syntax [K,X]=lqe(P21)--- bigR =blockdiag(Q_ww, R_vv); [W,Wt]=fullrf(bigR); Bw=W(1:size(Pd.B,1),:); Dw=W(($+1-size(Pd.C,1)):$,:); Pw=syslin(Pd.dt,Pd.A,Bw,Pd.C,Dw); Ko1=lqe(Pw); //same observer gain //Check gains equality norm(Ko-Ko1,1) // Form the observer O=observer(Pd,Ko); //check stability and(abs(spec(O.A))<1) // Check by simulation // Modify Pd to make it return the state Pdx=Pd;Pdx.C=eye(4,4);Pdx.D=zeros(4,1); t=0:dt:30; u=zeros(t); x=flts(u,Pdx,[1;0;0;0]);//state evolution y=Pd.C*x; // simulate the observer x_hat=flts([u+0.01*rand(u);y+0.0001*rand(y)],O); clf; subplot(2,2,1) plot2d(t',[x(1,:);x_hat(1,:)]'), e=gce();e.children.polyline_style=2; L=legend('$x_1=dy_1$', '$\hat{x_1}$');L.font_size=3; xlabel('Time (s)') subplot(2,2,2) plot2d(t',[x(2,:);x_hat(2,:)]') e=gce();e.children.polyline_style=2; L=legend('$x_2=dy_1^+$', '$\hat{x_2}$');L.font_size=3; xlabel('Time (s)') subplot(2,2,3) plot2d(t',[x(3,:);x_hat(3,:)]') e=gce();e.children.polyline_style=2; L=legend('$x_3=dy_2$', '$\hat{x_3}$');L.font_size=3; xlabel('Time (s)') subplot(2,2,4) plot2d(t',[x(4,:);x_hat(4,:)]') e=gce();e.children.polyline_style=2; L=legend('$x_4=dy_2^+$', '$\hat{x_4}$');L.font_size=3; xlabel('Time (s)')
Reference
Engineering and Scientific Computing with Scilab, Claude Gomez and al.,Springer Science+Business Media, LLC,1999, ISNB:978-1-4612-7204-5
See also
History
| Version | Description |
| 6.0 | lqe(P,Qww,Rvv) and lqe(P,Qww,Rvv,Swv) syntaxes added. |
| Report an issue | ||
| << leqr | Linear Quadratic | lqg >> |