rotate
rotation of a set of points
Syntax
xy1=rotate(xy,[theta,orig])
Arguments
- xy
matrix of size (2,.).
- xy1
matrix of size (2,.).
- theta
real, angle in radians; default value is 0.
- orig
center of the rotation [xc;yc]; default value is [0;0].
Description
rotate performs a rotation with angle theta:
xy1(:,i) = M(theta) *(xy(:,i) - orig) + orig
where M stands for the corresponding rotation matrix.
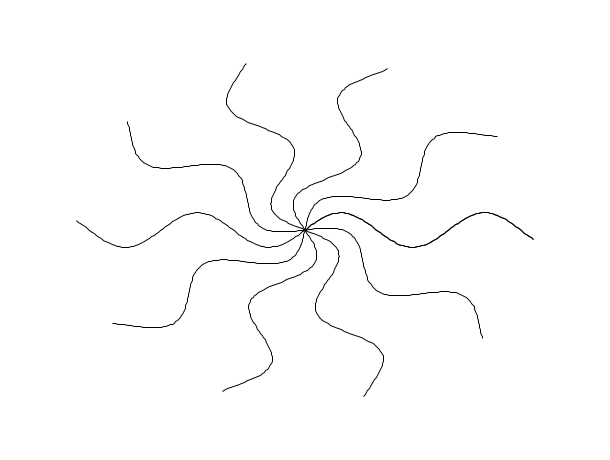
Examples
xsetech([0,0,1,1],[-1,-1,1,1]) xy=[(0:0.1:10);sin(0:0.1:10)]/10; for i=2*%pi*(0:10)/10, [xy1]=rotate(xy,i); xpoly(xy1(1,:),xy1(2,:),"lines") end
| Report an issue | ||
| << orthProj | transform | scaling >> |