Scilab 6.0.1
Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
xcos_simulate
Function for running xcos simulation in batch mode
Syntax
[Info, status]=xcos_simulate(scs_m, needcompile)
Arguments
- scs_m: A diagram data structure (see scs_m structure).
- needcompile: An integer. If it equals 4, then the simulator will perform a complete compilation of the diagram. If not, it will use cached value of %cpr. DEPRECATED
- status: A boolean. %T if simulation is successful, %f if simulation fails.
Description
This function is used to simulate xcos diagrams in batch mode. It requires the scs_m structure which can be obtained by loading in Scilab the.zcos file (see importXcosDiagram
).
User can also define pre_xcos_simulate
function that will run before simulation.
function continueSimulation=pre_xcos_simulate(scs_m, needcompile) // Do nothing continueSimulation = %t; endfunction
continueSimulation is set to false, the simulation will stop.
User can also define post_xcos_simulate
function that will run after simulation.
function post_xcos_simulate(%cpr, scs_m, needcompile) // Do Nothing endfunction
File content
SCI/modules/xcos/macros/xcos_simulate.sci
Examples
The xcos diagram in SCI/modules/xcos/demos/batch_simulation.zcos.
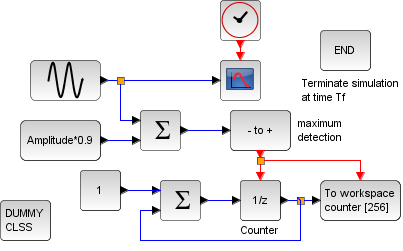
importXcosDiagram("SCI/modules/xcos/demos/batch_simulation.zcos") typeof(scs_m) //The diagram data structure //This diagram uses 3 context variables : // Amplitude : the sin function amplitude // Pulsation : the sin function pulsation // Tf : the final simulation time scs_m.props.context //the embedded definition //first batch simulation with the parameters embedded in the diagram xcos_simulate(scs_m, 4); // Change the final time value scs_m.props.context = ["Amplitude=2" "Pulsation=3" "Tf=10"]; xcos_simulate(scs_m, 4); // Now Change pulsation scs_m.props.context = ["Amplitude=2" "Pulsation=9" "Tf=10"]; xcos_simulate(scs_m, 4); //get the variable created by the "from workspace block" counter
Statistic analysis of the diagram using pre_xcos_simulate function.
importXcosDiagram("SCI/modules/xcos/demos/batch_simulation.zcos") typeof(scs_m) //The diagram data structure // Declare pre_xcos_simulation to only analyze Diagram. function continueSimulation=pre_xcos_simulate(scs_m, needcompile) // Retrieve all objects objs = scs_m.objs; links = 0; blocks = 0; other = 0; // Count Links and Blocks for i = 1:size(objs) currentType = typeof(objs(i)); select (currentType) case "Link" links = links + 1; case "Block" blocks = blocks + 1; else other = other + 1; end end // Diplay Diagram analisys. disp("Diagram Analysis:") disp("Found "+string(blocks)+" Blocks.") disp("Found "+string(links)+" Links.") disp("Found "+string(other)+" Other component.") // We do not want any simulation, just analyze Diagram continueSimulation = %f; endfunction //first batch simulation with the parameters embedded in the diagram xcos_simulate(scs_m, 4);
The xcos diagram: SCI/modules/xcos/demos/Command.zcos
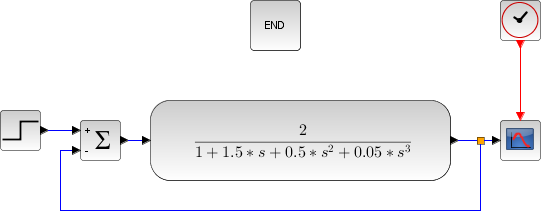
importXcosDiagram("SCI/modules/xcos/demos/Command.zcos") // Clear any pre_xcos_simulation; clear pre_xcos_simulate; function post_xcos_simulate(%cpr, scs_m, needcompile) // Retrieve all objects objs = scs_m.objs; clrBlock = []; //Looking for CLR block for i=1:size(objs) if objs(i).gui == "CLR" then clrBlock = objs(i); break; end end // Check if we found some CLR if isempty(clrBlock) then disp("No CLR block found.") return end // Retrieve exprs exprs = clrBlock.graphics.exprs; s = poly(0,'s'); num = evstr(exprs(1)); den = evstr(exprs(2)); h = syslin('c', num/den); // Open new figure then plot Bode scf(max(winsid())+1); bode(h, 0.01, 100); endfunction xcos_simulate(scs_m, 4);
The xcos diagram: SCI/modules/xcos/demos/Command_bode.zcos
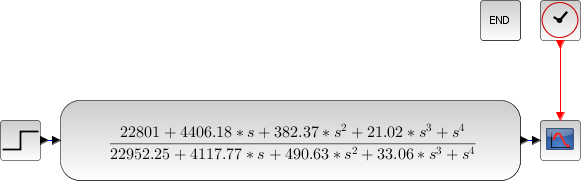
importXcosDiagram("SCI/modules/xcos/demos/Command_bode.zcos") // Clear any post_xcos_simulation; clear post_xcos_simulate; function continueSimulation=pre_xcos_simulate(scs_m, needcompile) // Retrieve all objects objs = scs_m.objs; clrBlock = []; //Looking for CLR block for i=1:size(objs) if objs(i).gui == "CLR" then clrBlock = objs(i); break; end end // Check if we found some CLR if isempty(clrBlock) then disp("No CLR block found.") return end // Retrieve exprs exprs = clrBlock.graphics.exprs; s = poly(0,'s'); num = evstr(exprs(1)); den = evstr(exprs(2)); h = syslin('c', num/den); // Open new figure then plot Bode scf(max(winsid())+1); bode(h, 0.01, 100); // Stop after bode plot. We do not want any simulation. continueSimulation = %f; endfunction xcos_simulate(scs_m, 4);
See also
- scs_m structure — Define a scs_m structure
- importXcosDiagram — Import a Xcos diagram on Scilab
- scicosim — xcos (batch) simulation function
- xcos — Editeur de schéma-bloc et IHM pour le simulateur hybride
- steadycos — Finds an equilibrium state of a general dynamical system described by a xcos diagram
- lincos — Constructs by linearization a linear state-space model from a general dynamical system described by a Xcos diagram
| Report an issue | ||
| << steadycos | Fonctions Batch | xcosValidateBlockSet >> |