Please note that the recommended version of Scilab is 2026.1.0. This page might be outdated.
See the recommended documentation of this function
TCLSS
Continuous linear system with jump
Block Screenshot
Contents
Palette
Description
This block realizes a continuous-time linear state-space system with the possibility of jumps in the state. The number of inputs to this block is two. The first input is the regular input of the linear system, the second carries the new value of the state which is copied into the state when an event arrives at the unique event input port of this block. That means the state of the system jumps to the value present on the second input (of size equal to that of the state). The system is defined by the (A,B,C,D) matrices and the initial state x_0. The dimensions must be compatible. The sizes of inputs and outputs are adjusted automatically.
Dialog box
A matrix
Asquare matrix.Properties : Type 'mat' of size [-1,-1].
B matrix
The
Bmatrix, [] if system has no input.Properties : Type 'mat' of size ["size(%1,2)","-1"].
C matrix
The
Cmatrix , [] if system has no output.Properties : Type 'mat' of size ["-1","size(%1,2)"].
D matrix
The
Dmatrix, [] if system has no D term.Properties : Type 'mat' of size [-1,-1].
Initial state
A vector/scalar initial state of the system.
Properties : Type 'vec' of size "size(%1,2)".
Default properties
always active: yes
direct-feedthrough: no
zero-crossing: no
mode: no
regular inputs:
- port 1 : size [1,1] / type 1
- port 2 : size [1,1] / type 1
regular outputs:
- port 1 : size [1,1] / type 1
number/sizes of activation inputs: 1
number/sizes of activation outputs: 0
continuous-time state: yes
discrete-time state: no
object discrete-time state: no
name of computational function: tcslti4
Interfacing function
SCI/modules/scicos_blocks/macros/Linear/TCLSS.sci
Computational function
SCI/modules/scicos_blocks/src/c/tcslti4.c (Type 4)
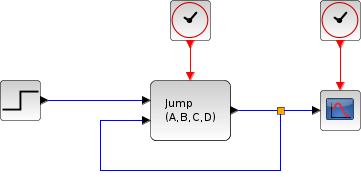
Example
| Report an issue | ||
| << PID | Continuous_pal | TIME_DELAY >> |