CLSS
Représentation d'état en temps continu
Aperçu
Contenu
Description
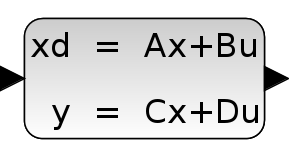
Ce bloc réalise une représentation d'état linéaire en temps continu
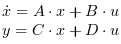
où x est le vecteur des variables d'état, u le vecteur des fonctions d'entrée et y le vecteur des variables de sortie.
Le système est défini par les matrices (A, B, C, D) et l'état initial X0. Les dimensions doivent être compatibles.
Paramètres
A matrix
La matrice carrée A.
Propriétés Type 'mat' de taille [-1,-1].
B matrix
La matrice B , [] Ssi le système n'a pas d'entrées.
Propriétés Type 'mat' de taille ["size(%1,2)","-1"].
C matrix
La matrice C, [] si le système n'a pas de sorties.
Propriétés Type 'mat' de taille ["-1","size(%1,2)"].
D matrix
La matrice D, [] si le système n'a pas de terme D.
Propriétés Type 'mat' de taille [-1,-1].
Initial state
Un vecteur/scalaire : l'état initial du système.
Propriétés Type 'vec' de taille "size(%1,2)".
Propriétés par défaut
always active: oui
direct-feedthrough: non
zero-crossing: non
mode: non
regular inputs:
- port 1 : size [1,1] / type 1
regular outputs:
- port 1 : size [1,1] / type 1
number/sizes of activation inputs: 0
number/sizes of activation outputs: 0
continuous-time state:oui
discrete-time state: non
object discrete-time state:non
name of computational function: csslti4
Fonction d'interfaçage
SCI/modules/scicos_blocks/macros/Linear/CLSS.sci
Fonction de calcul
SCI/modules/scicos_blocks/src/c/csslti4.c (Type 4)
Exemple
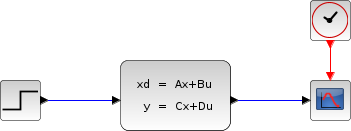
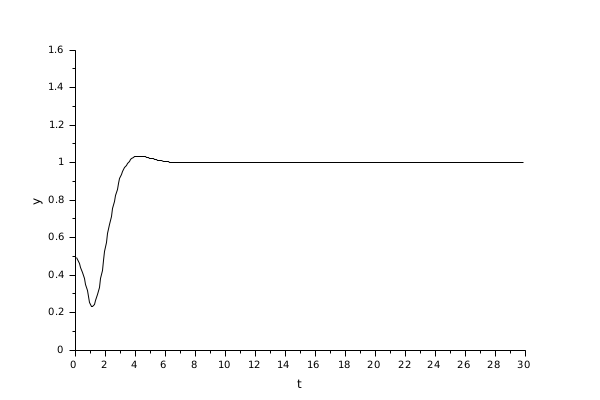
Cet exemple illustre l'utilisation du bloc CLSS pour simuler et afficher la forme d'onde en sortie y(t)=Vc(t) du circuit RLC ci-dessous.
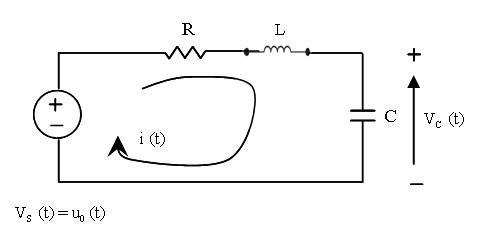
Les équations pour un circuit RLC sont les suivantes. Elles résultent des lois en tension de Kirchhoff's et de la loi de Newton.
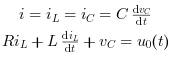
R, L et C sont les résistance, inductance et capacité du système.
Nous définissons la tension aux bornes de la capacité Vc et le courant
dans l'inductance iL comme variables d'état
X1 et X2.
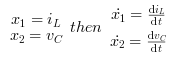
d'où

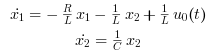
En réarrangeant ces équations on obtient :
Ces équations peuvent être mises sous forme d'un système matriciel comme suit ,
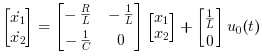
L'équation de sortie requise est :

Le schéma suivant montre ces équations modéllisées dans Xcos où R= 10 Ω, L= 5 mΗ et C= 0,1 µF; Les états initiaux sont x1=0 et x2=0,5.
Pour obtenir la sortie Vc(t) on utilise le bloc CLSS de la palette Systèmes à temps continu.
| Report an issue | ||
| << CLR | Palette Systèmes à temps continu | DERIV >> |