DLSS
Représentation d'état en temps discret
Aperçu
Description
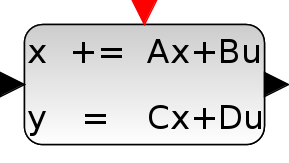
Ce bloc réalise une représentation d'état en temps discret d'un système. Le système est défini par les matrices et l'état initial. Les dimensions doivent être compatibles. L'état est mis à jour lorsque un événement se produit sur l'unique port d'activation unique.
Paramètres
A matrix
Matrice carrée.
Propriétés : Type 'mat' de taille [-1,-1].
B matrix
La matrice B. [] si le système n'a pas d'entrées.
Propriétés : Type 'mat' de taille ["size(%1,2)","-1"].
C matrix
La matrice C. [] si le système n'a pas de sorties.
Propriétés : Type 'mat' de taille ["-1","size(%1,2)"].
D matrix
La matrice D. [] si le système n'a pas de terme D.
Propriétés : Type 'mat' de taille [-1,-1].
Initial state
Un vecteur/scalaire : état initial du système.
Propriétés : Type 'vec' de taille "size(%1,2)".
Propriétés par défaut
always active: non
direct-feedthrough: non
zero-crossing: non
mode: non
regular inputs:
- port 1 : size [1,1] / type 1
regular outputs:
- port 1 : size [1,1] / type 1
number/sizes of activation inputs: 1
number/sizes of activation outputs: 0
continuous-time state: non
discrete-time state: oui
object discrete-time state: non
name of computational function: dsslti4
Fonction d'interfaçage
SCI/modules/scicos_blocks/macros/Linear/DLSS.sci
Fonction de calcul
SCI/modules/scicos_blocks/src/c/dsslti4.c (Type 4)
| Report an issue | ||
| << DLRADAPT_f | Palette Systèmes à temps discret | DOLLAR_f >> |